EtherCAT®
AG25, AG26 Date: 09.07.2018 Art. No. 88094 Mod. status 225/18 Page 55 of 109
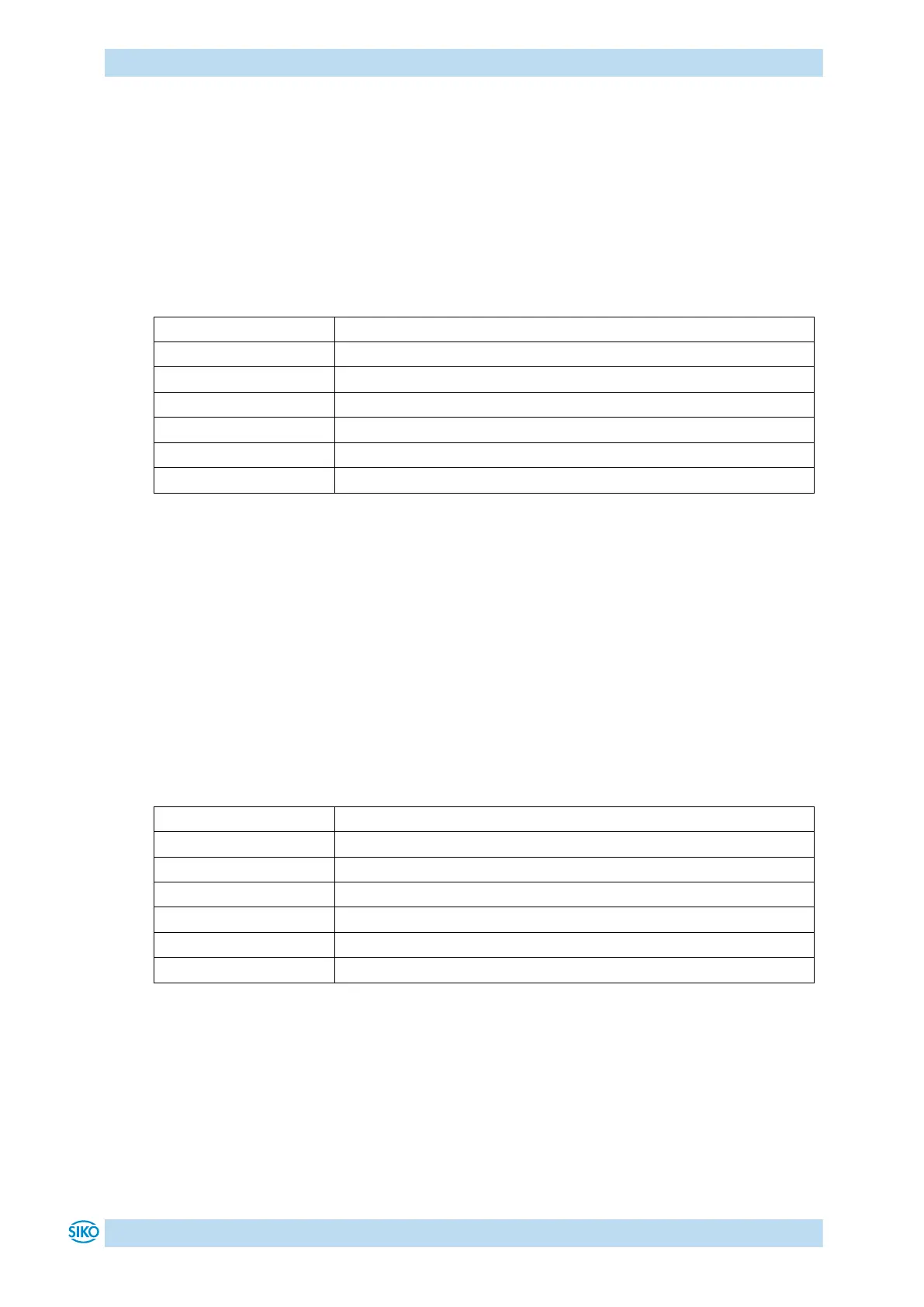
8.2.1.40 Loop Length
This parameter determines the loop length for the loop + and loop - positioning types.
Operating mode: Positioning mode
Spindle pitch = 0: Values refer to steps
Spindle pitch > 0 values refer to travel distance in 1/100 mm
Operating mode: Speed mode:
Irrelevant
8.2.1.41 Contouring Error Limit
Upon starting a travel job, the ramp generator generates target position values in order to
reach the target position with the desired velocity profile (A-Pos, V-Pos, D-Pos).
Position regulation attempts to readjust the drive’s actual position and to keep the regulation
deviation as small as possible.
Disturbance variables such as load or friction can disable the drive’s following the position
values.
The control deviation (contouring error) will increase steadily. If the control deviation
exceeds the value of the contouring error limit, this will result in the contouring error fault.
The maximum admissible contouring error is indicated in steps.