EtherCAT®
AG25, AG26 Date: 09.07.2018 Art. No. 88094 Mod. status 225/18 Page 32 of 109
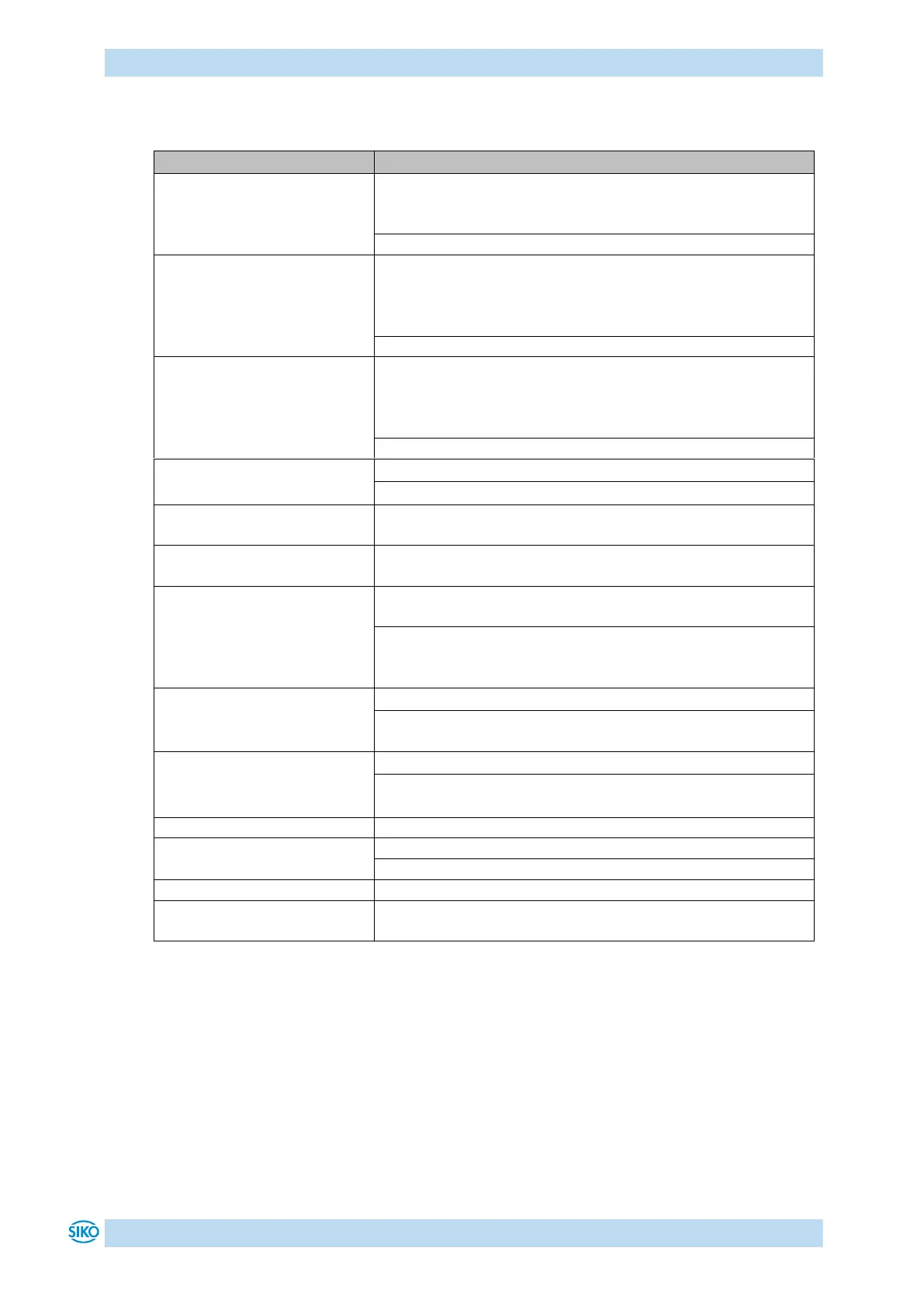
8.2.1.2.1 Control word Positioning mode (master slave)
0 = OFF1 active
Current travel job is canceled.
The actuator is enabled.
0 = OFF2 active
Current travel job is canceled.
The actuator is decelerated with max. delay; the actuator
continues to be controlled.
Bit 2
OFF3 (progr. delay)
0 = OFF3 active
Current travel job is canceled.
The actuator is decelerated with prog. delay, the actuator
continues to be controlled.
1 = intermediate stop active
Positive slope starts a travel job
Positive slope acknowledges an error
Afterwards, the actuator changes to the switch-lock state.
0 = no inching mode 1
If the travel job is not completed yet it will be canceled.
1 = inching mode 1
As long as this bit is set, the actuator travels over the
distance specified in parameter Delta Tipp.
Bit 7
Inching mode 2 positive
0 = no inching mode 2 positive
1 = inching mode 2 positive
The actuator travels in positive direction
Bit 8
Inching mode 2 negative
0 = no inching mode 2 negative
1 = inching mode 2 negative
The actuator travels in negative direction
Bit 10
Relative positioning
Positive edge calibrates the drive (see chapter 5).
Table 2: Control word of positioning mode
 Loading...
Loading...

