EtherCAT®
AG25, AG26 Date: 09.07.2018 Art. No. 88094 Mod. status 225/18 Page 27 of 109
8 EtherCAT®
8.1 Description
The actuator is an EtherCAT® slave. The actuator supports the CANopen over EtherCAT protocol
(CoE) according to the DS301 communication profile.
8.1.1 Cyclic data exchange
Cyclic process data is exchanged via PDO frames. Mapping is static and cannot be changed.
8.1.2 Acyclic data exchange
Acyclic data is exchanged via SDO frames.
8.1.3 Operating modes and synchronization
The actuator supports only the Free Run operating mode. The actuator is not synchronized.
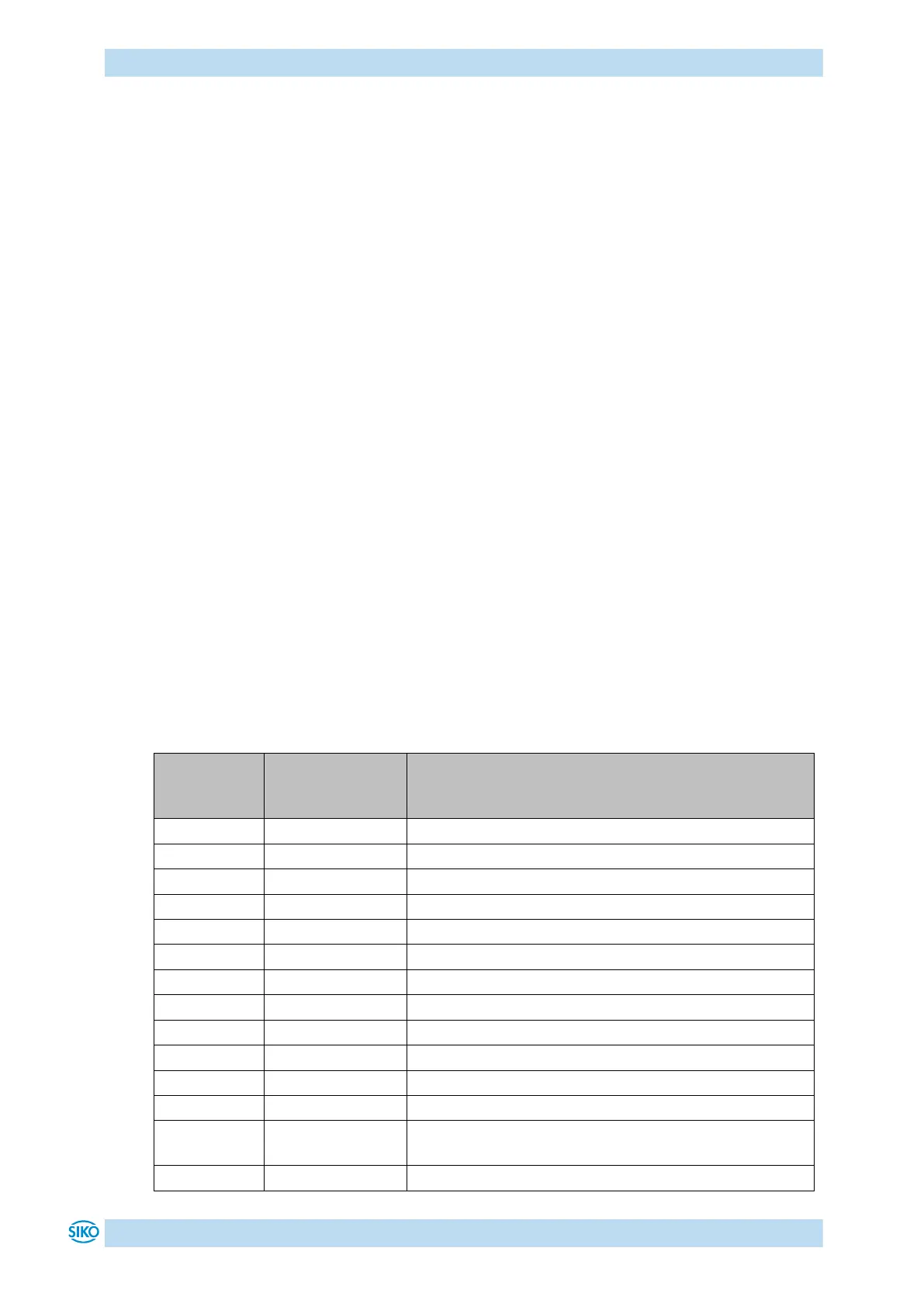
8.1.4 Emergency Messages
Any errors occurring trigger emergency messages in the drive, which are sent to the EtherCAT®
master via mailbox communication. A drive-internal error code is converted into the
Emergency Error Code according to the following table and transmitted as part of the CoE
Emergency Frame.
Low voltage of control electronic system
Overvoltage of control electronic system
Overvoltage of power electronic system
Output stage excess temperature
Power electronic system not supplied
Ethernet module in the ERROR state while travel job is
active
Ethernet module in the EXCEPTION state

 Loading...
Loading...
