7 Motion Parameters
7.3.2 Electronic Gear
7-46
Parameter
Parameter No.
(Register No.)
Name Description
Default
Value
Motion Fixed
Parameters
No. 6 Command Unit
per Revolution
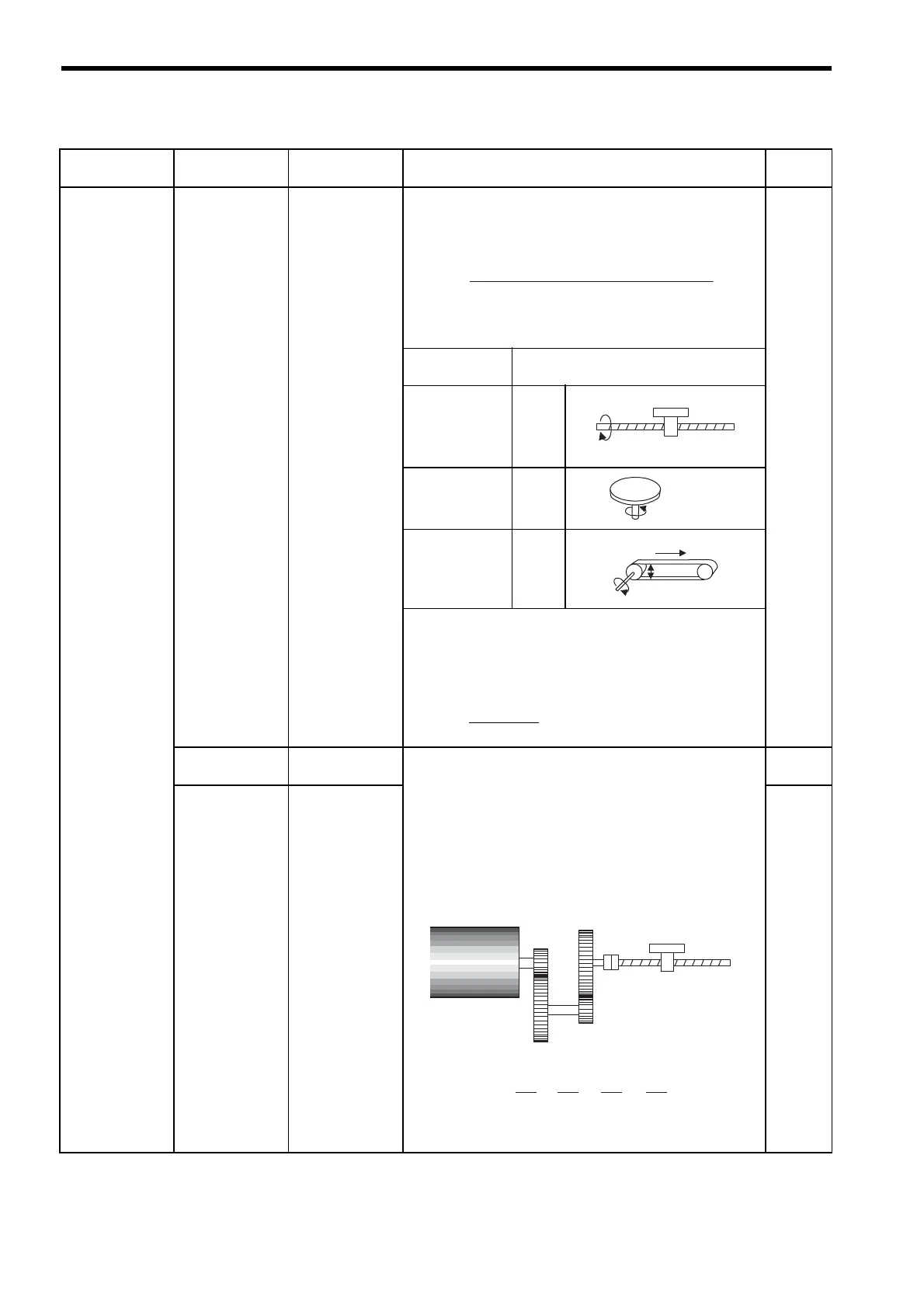
• This parameter shows the load moving amount for each
rotation of the load axis. Sets the load moving amount value
divided by the reference unit.
• Some examples of the load moving amount are shown
below.
10000
Reference Units
per Revolution
Load Configuration Examples
P [mm]
Ball
screw
360 [
°]
Rotat-
ing
table
D [mm]
Belt
•
Setting range: 1 to 2
31
−1 [1 = 1 reference unit]
■
Setting Examples
• Load moving amount per load axis rotation = 12 mm
• Reference unit = 0.001 mm
No. 8 Gear Ratio
[MOTOR]
• These parameters are used to set the gear ratio between the
motor and the load. When the motor axis has rotated m
times and the mechanical configuration allows the load axis
to rotate n times, set the following values:
No. 8 = m rotations
No. 9 = n rotations
• Setting range: 1 to 65,535 [rotations]
■
Setting Examples
Therefore, set the following values: No. 8 = 21
No. 9 = 4
1
No. 9 Gear Ratio
[LOAD]
1
No.6 =
Reference unit
Load travel distance per load axis rotation
P = Ball screw pitch
One rotation
One rotation
360
°
D
D
π
One rotation
No.6 = = 12000
0.001 mm
12 mm
Motor axis
m rotations
7 rotations
Load axis n rotations
4 rotations
3 rotations
9 rotations
Gear ratio = =
×
=
m
n
7
3
9
4
21
4
 Loading...
Loading...





