8.8 STEP Operation (STEP)
8-45
8
(b) Monitoring Parameters
(5) Timing Charts
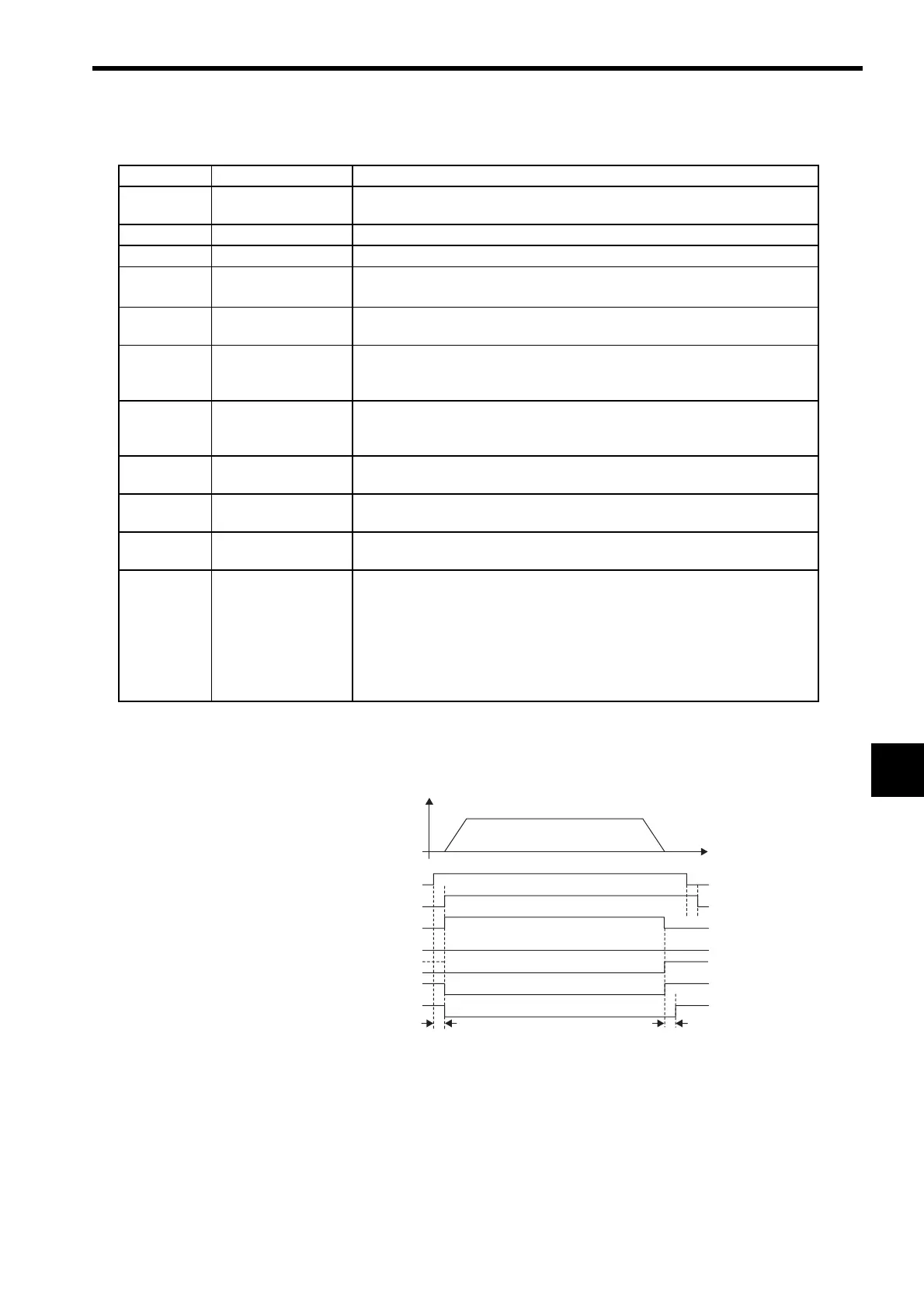
(a) Normal Execution
Parameter Name Monitor Contents
IB
001 Servo ON Indicates the Servo ON status.
ON: Power supplied to Servomotor, OFF: Power not supplied to Servomotor
IL
02 Warning Stores the most current warning.
IL
04 Alarm Stores the most current alarm.
IW
08 Servo Command
Type Response
Indicates the motion command that is being executed.
The response code is 8 during STEP command execution.
IB
090 Command Executing The Command Executing bit will turn ON during STEP command execution and
then turn OFF when STEP command execution has been completed.
IB
091 Hold Completed Turns ON when a deceleration to a stop has been completed as the result of
setting the Command Pause bit (OB
090) to 1 during STEP command execu-
tion.
IB
093 Command Error End Turns ON if an error occurs during STEP command execution. The axis will
decelerate to a stop if it is moving. Turns OFF when another command is
executed.
IB
098 Command
Completed
Turns ON when STEP command execution has been completed.
IB
0C0 Distribution
Completed
Turns ON when pulse distribution has been completed for the move command.
Turns OFF during execution of a move command.
IB
0C1 Positioning
Completed
Turns ON when pulse distribution has been completed and the current position is
within the Positioning Completed Width. OFF in all other cases.
IB
0C3 Position Proximity The operation depends on the setting of the Positioning Completed Width 2
(setting parameter OL
20).
OL
20 = 0: Turns ON when pulse distribution has been completed (DEN =
ON).
OL
20
≠
0: Turns ON when
MPOS - APOS
< Position Proximity Setting
even if pulse distribution has not been completed.
OFF in all other cases.
OW08 = 8 (STEP)
IW08 = 8 (STEP)
IB090 (BUSY)
Undefined length of time
IB098 (COMPLETE)
IB093 (FAIL)
IB0C0 (DEN)
IB0C1 (POSCOMP)
1 scan
 Loading...
Loading...





