9 Control Block Diagrams
9.1.4 Speed Control
9-14
9.1.4 Speed Control
(1) Motion Parameters for Speed Control
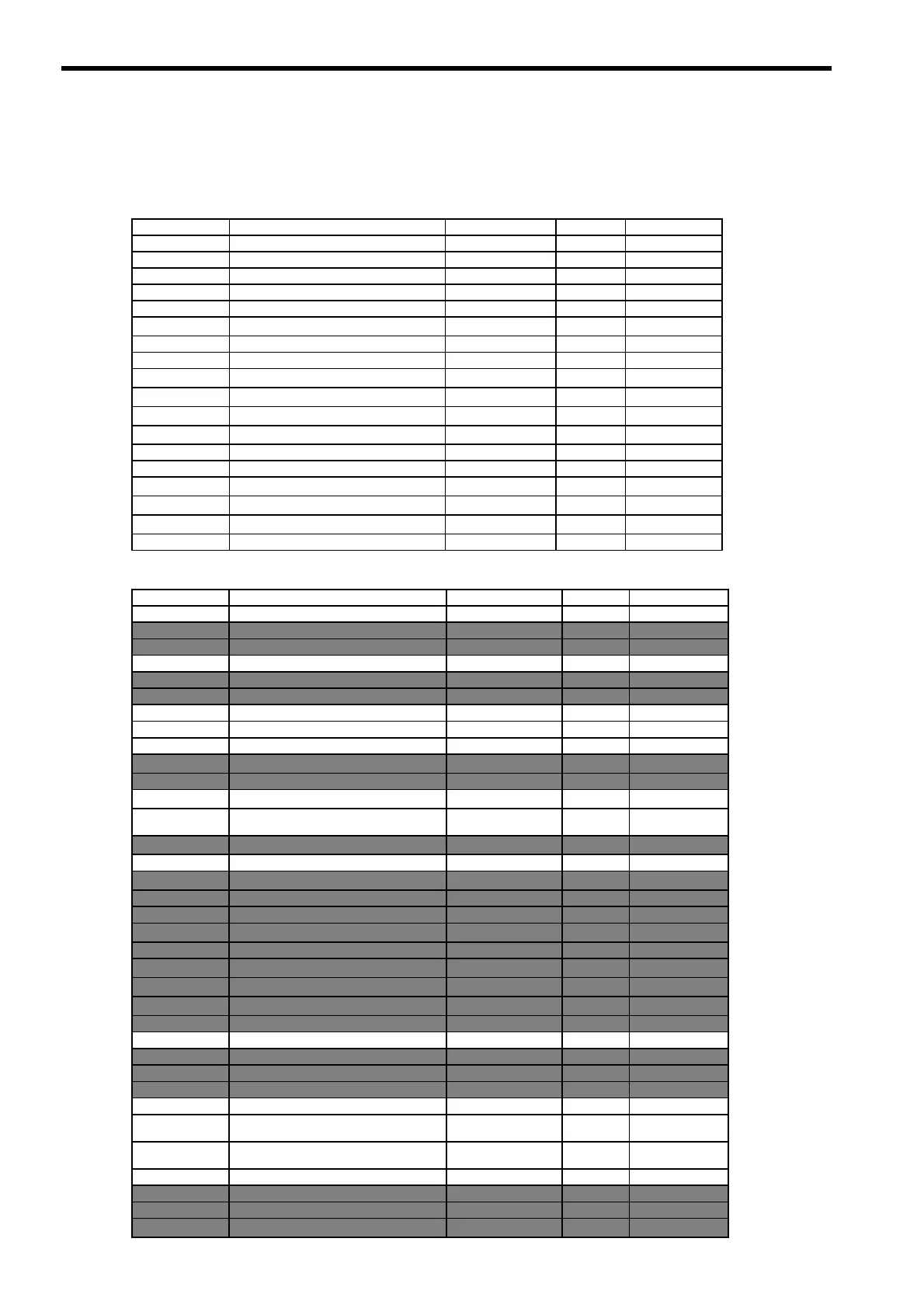
(a) Fixed Parameters
(b) Setting Parameters
No. Name Setting Unit Default Value Setting Range
0 Run Mode
− 1 0 to 5
1 Function Selection 1 − 0000 h Bit Setting
2 Function Selection 2 − 0000 h Bit Setting
4 Command Unit − 0 0 to 3
5 Number of Decimal Places − 3 0 to 5
6 Command Unit per Revolution Reference unit 10,000
1 to 2
31
−
1
8 Gear Ratio [MOTOR] − 1 1 to 65535
9 Gear Ratio [LOAD] − 1 1 to 65535
10 Maximum Value of Rotary Counter (POSMAX) Reference unit 360,000
1 to 2
31
−
1
12 Forward Software Limit Reference unit
2
31
−
1
−
2
31
to 2
31
−
1
14 Reverse Software Limit Reference unit
−
2
31
−
2
31
to 2
31
−
1
16 Backlash Compensation Reference unit 0
−
2
31
to 2
31
−
1
29 Motor Type − 0 0 or 1
30 Encoder Type − 0 0 to 3
34 Rated Speed
min
−
1
3,000 1 to 32,000
36 Encoder Resolution pulse 65,536
1 to 2
31
−
1
38 Max. Revolutions of Absolute Encoder Rev 65,534
0 to 2
31
−
1
42 Feedback Speed Moving Average Time Constant ms 10 0 to 32
No. Name Setting Unit Default Value Setting Range
OW
00 Run Commands − 0000 h Bit Setting
OW
01 Mode 1 − 0000 h Bit Setting
OW
02 Mode 2 − 0000 h Bit Setting
OW
03 Function 1 − 0011 h Bit Setting
OW
04 Function 2 − 0033 h Bit Setting
OW
05 Function 3 − 0000 h Bit Setting
OW
08 Motion Command − 0 0 to 26
OW
09 Motion Command Options − 0000 h Bit Setting
OW
0A Motion Subcommand − 0 0 to 65535
OL
0C Torque Reference Depends on torque unit. 0
−
2
31
to 2
31
−
1
OW
0E Speed Limit at Torque Reference 0.01% 15000,
−
32,768 to 32,767
OL
10 Speed Reference Depends on speed unit. 3,000
−
2
31
to 2
31
−
1
OL
14 Positive Side LimitingTorque Setting at the Speed
Reference
Depends on torque unit. 30,000
−
2
31
to 2
31
−
1
OL
16 Secondly Speed Compensation Depends on speed unit. 0
-2
31
~
2
31
-1
OW
18 Speed Override 0.01% 10,000 0 to 32,767
OL
1C Position Reference Type Reference unit 0
−
2
31
to 2
31
−
1
OL
1E Positioning Completed Width Reference unit 100 0 to 65,535
OL
20 Positioning Completed Width 2 Reference unit 0 0 to 65,535
OL
22 Deviation Abnormal Detection Value Reference unit
2
31
−
1 0 to 2
31
−
1
OW
26 Position Complete Timeout ms 0 0 to 65,535
OL
28 Phase Compensation Reference unit 0
−
2
31
to 2
31
−
1
OL
2A Latch Zone Lower Limit Setting Reference unit
−
2
31
−
2
31
to 2
31
−
1
OL
2C Latch Zone Upper Limit Setting Reference unit
2
31
−
1
−
2
31
to 2
31
−
1
OW
2E Position Loop Gain 0.1/s 300 0 to 32,767
OW
2F Speed Loop Gain Hz 40 1 to 2,000
OW
30 Speed Feed Forward Compensation 0.01% 0 0 to 32,767
OW
31 Speed Amends 0.01% 0
−
32,768 to 32,767
OW
32 Position Integration Time Constant ms 0 0 to 32,767
OW
34 Speed Integration Time Constant 0.01 ms 2,000 15 to 65,535
OL
36 Linear Acceleration Time Depends on acceleration/
deceleration unit.
0
0 to 2
31
−
1
OL
38 Linear Deceleration Time Depends on acceleration/
deceleration unit.
0
0 to 2
31
−
1
OW
3A S-Curve Acceleration Time 0.1 ms 0 0 to 65,535
OW
3C Home Return Type − 0 0 to 19
OW
3D Home Window Reference unit 100 0 to 65,535
OL
3E Approach Speed Depends on speed unit. 1,000
−
2
31
to 2
31
−
1
 Loading...
Loading...





