11 SVR Virtual Motion Module
11.2.2 Motion Parameter Settings
11-10
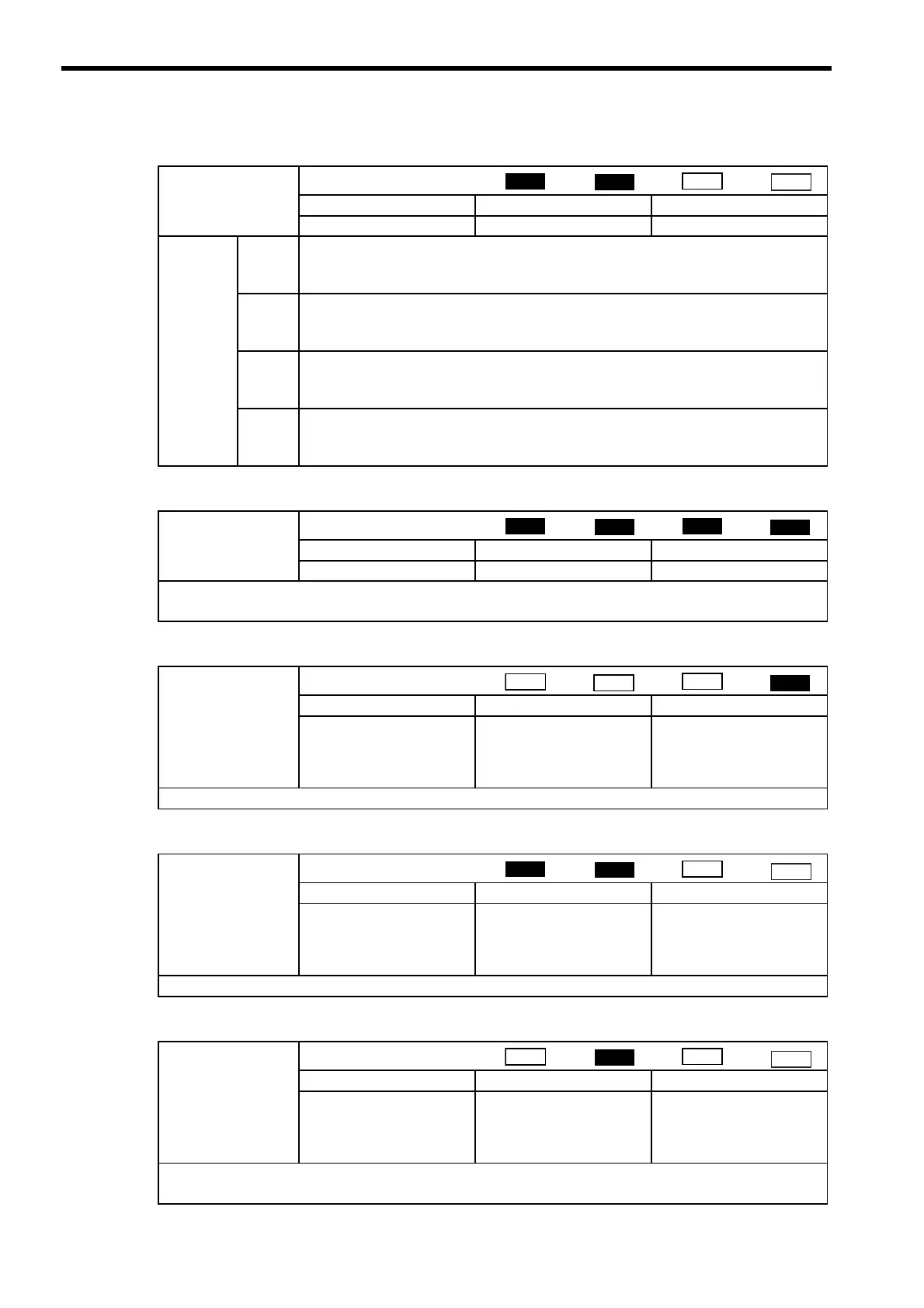
(d) Motion Command Control Flags
(e) Motion Subcommands
(f) Torque Reference
(g) Speed Reference
(h) Secondly Speed Compensation
OW
09
Motion Command Options
Setting Range Setting Unit Default Value
−−0000 H
OW
09
Bit 0
Command Pause
0: Command pause OFF (default)
1: Command pause ON
Bit 1
Command Abort
0: Command abort OFF (default)
1: Command abort ON
Bit 2
Jog/Step Direction
0: Forward (default)
1: Reverse
Bit 5
Position Reference Type
0: Incremental addition mode (default)
1: Absolute position reference mode
OW
0A
Motion Subcommand
Setting Range Setting Unit Default Value
0 to 5 − 0
Set the motion subcommand to be used with the motion command.
Only 0: NOP and 5: FIXPRM_RD can be used.
OW
0C
Torque Reference
Setting Range Setting Unit Default Value
−
2
31
to 2
31
−
1
Depends on the torque unit
set in Function 1 (setting
parameter OW
03, bits C
to F)
0
Set the torque reference for torque reference commands.
OW
10
Speed Reference
Setting Range Setting Unit Default Value
−
2
31
to 2
31
−
1
Depends on the speed unit set
in Function 1 (setting
parameter OW
03, bits 0
to 3)
3000
Set the speed reference.
OW
16
Secondly Speed Compensation
Setting Range Setting Unit Default Value
−
2
31
to 2
31
−
1
Depends on the speed unit set
in Function 1 (setting
parameter OW
03, bits 0
to 3)
0
Set the speed feed forward amount for the Phase Reference command (PHASE).
When used at the same time as Speed Amends (OW
31), speed compensation can be performed twice.
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
 Loading...
Loading...





