11 SVR Virtual Motion Module
11.3.2 Motion Command Details
11-34
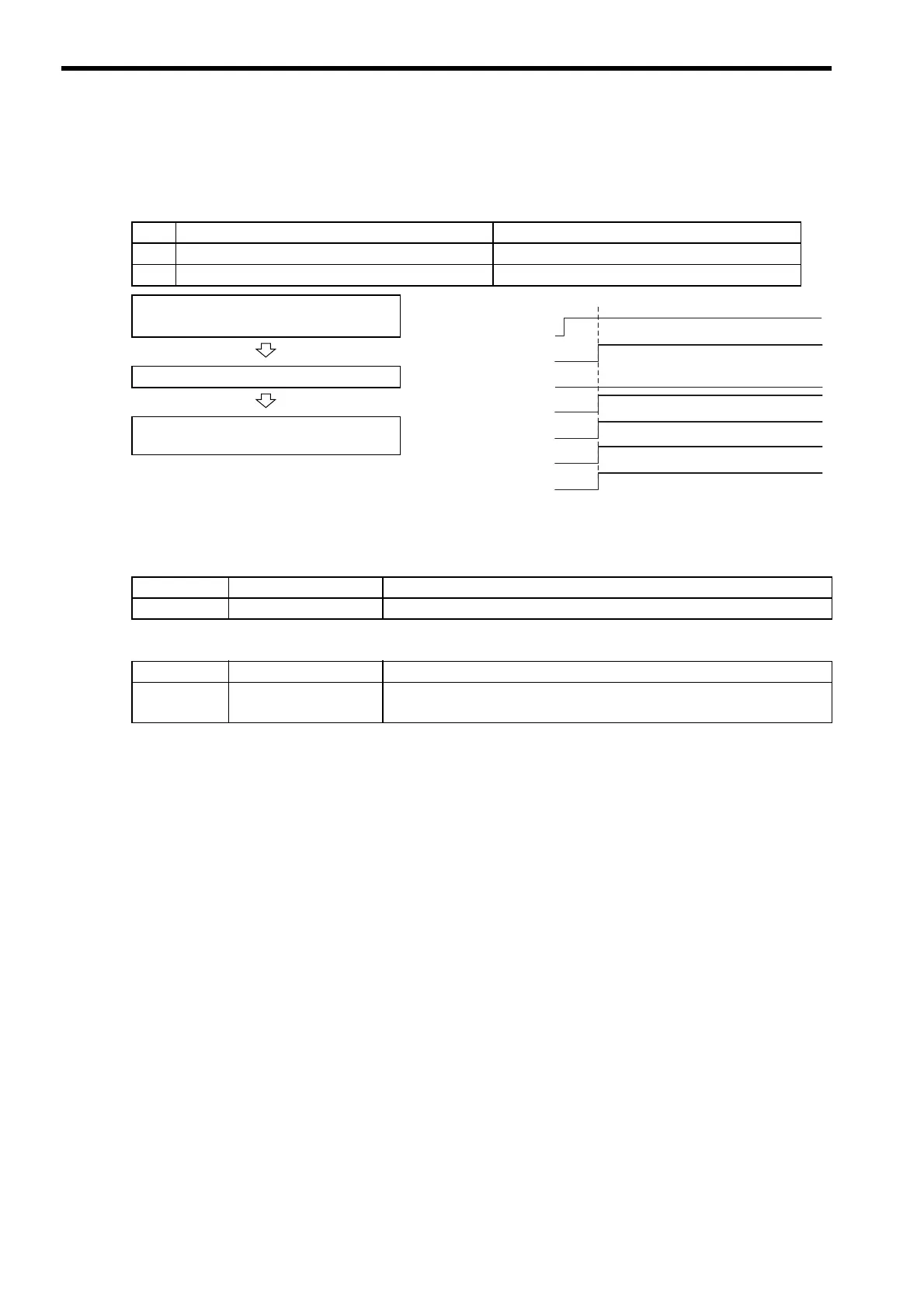
(10) Torque Reference (TRQ)
The SVR does not support a torque control function.
(a) Operating Procedure
(b) Related Parameters
• Setting Parameters
• Monitoring Parameters
No. Execution Conditions Confirmation Method
1 There are no alarms. Both IL
02 and IL
04 are 0.
2 Motion command execution has been completed. IW
08 is 0 and IB
090 is OFF.
Execute the TRQ motion command.
• Set OW
08 to 24.
The value 24 is returned to IW
08.
Execute another motion command to cancel
the torque control mode.
OW08 = 24 (TRQ)
IW08 = 24 (TRQ)
IB090 (BUSY)
IB098 (COMPLETE)
IB0C0 (DEN)
IB0C1 (POSCOMP)
IB0C3 (NEAR)
Parameter Name Setting
OW
08 Motion Command The mode is changed to torque control when this parameter is set to 24.
Parameter Name Monitor Contents
IW
08 Servo Command Type
Response
Indicates the motion command that is being executed.
The response code will be 24 during TRQ command execution.
 Loading...
Loading...





