Def / Type
FbEq 16b / 32b
DescriptionName / Range /
Selection
No.
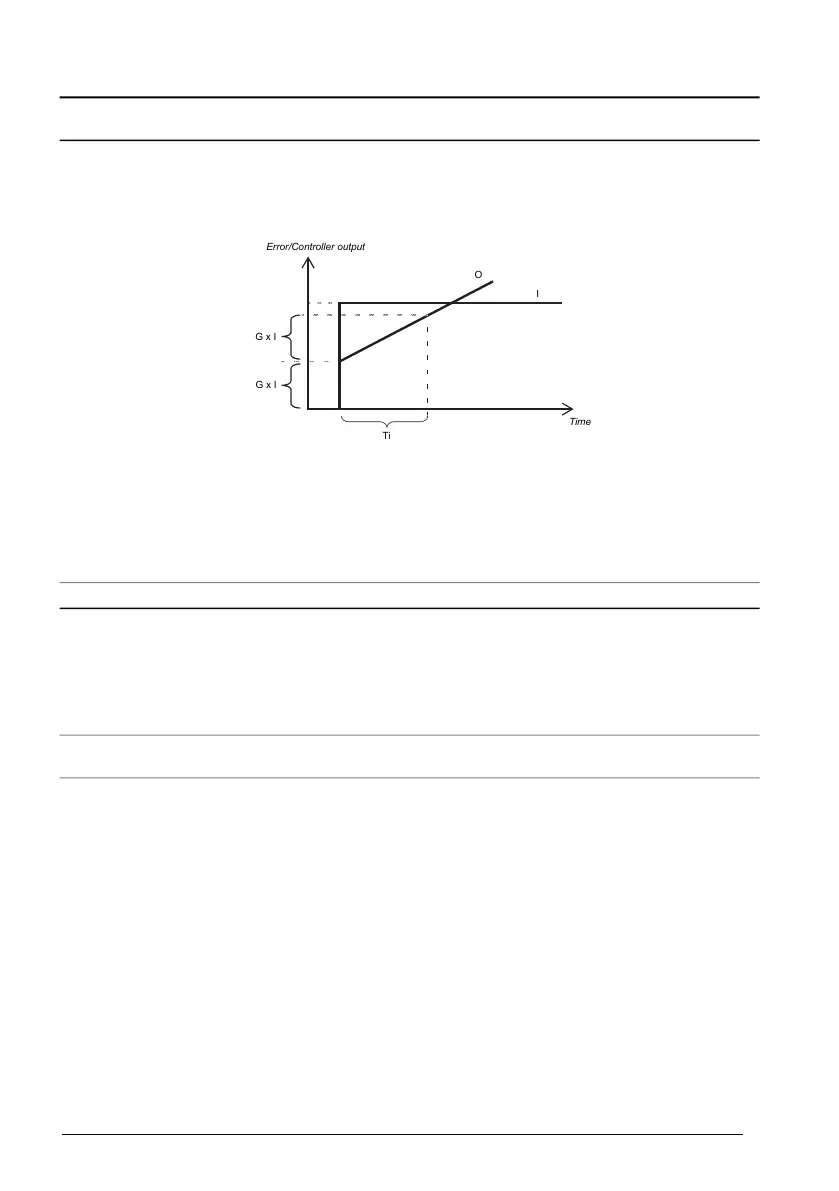
60.0 s / real32Defines the integration time for the process PID controller.
This time needs to be set to the same order of magnitude
as the reaction time of the process being controlled,
otherwise instability will result.
Error/Controller output
Time
Ti
I
O
G x I
G x I
I = controller input (error)
O = controller output
G = gain
Ti = integration time
Note: Setting this value to 0 disables the “I” part, turning
the PID controller into a PD controller.
Set 1 integration time40.33
1 = 1 s / 10 = 1 sIntegration time.0.0 ... 32767.0 s
0.000 s / real32Defines the derivation time of the process PID controller.
The derivative component at the controller output is
calculated on basis of two consecutive error values (E
K-1
and E
K
) according to the following formula:
PID DERIV TIME × (E
K
- E
K-1
)/T
S
, in which
T
S
= 2 ms sample time
E = Error = Process reference - process feedback.
Set 1 derivation time40.34
1000 = 1 s / 1000 = 1
s
Derivation time.0.000 ... 10.000 s
382 Parameters
 Loading...
Loading...


















