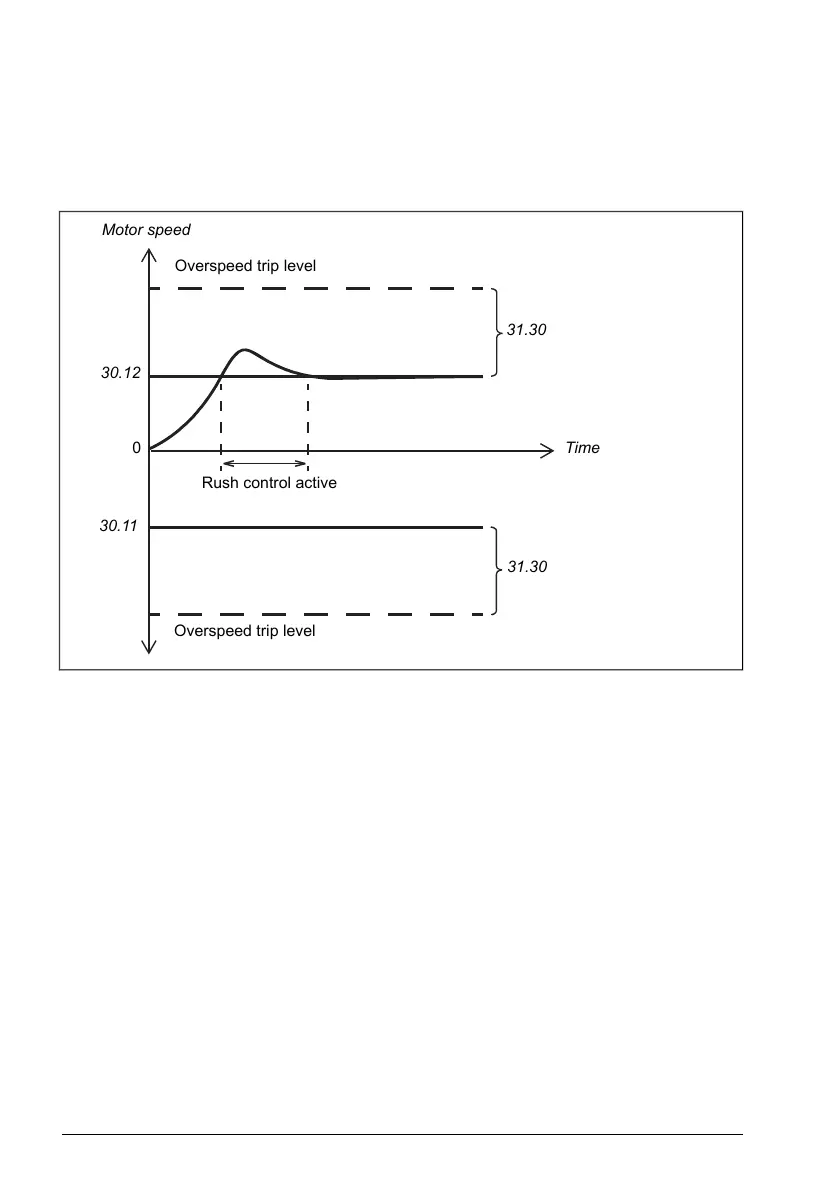
■ Rush control
In torque control, the motor could potentially rush if the load were suddenly lost. The
control program has a rush control function that decreases the torque reference whenever
the motor speed (90.1) exceeds parameter 30.11 or 30.12.
Motor speed
Overspeed trip level
Rush control active
Overspeed trip level
30.12
30.11
0
31.30
31.30
Time
The function is based on a PI controller. The proportional gain and integration time can
be defined by parameters. Setting these to zero disables rush control.
Settings and diagnostics
Parameter groups: 30 Limits (page 319), 31 Fault functions (page 330) and 90 Feedback
selection (page 472).
Parameters: 26.81 Rush control gain (page 304) and 26.82 Rush control integration
time (page 304).
■ Encoder support
The program supports two single-turn or multiturn encoders (or resolvers). The following
optional interface modules are available:
• TTL encoder interface FEN-01: two TTL inputs, TTL output (for encoder emulation
and echo) and two digital inputs
• Absolute encoder interface FEN-11: absolute encoder input, TTL input, TTL output
(for encoder emulation and echo) and two digital inputs
54 Program features