Def / Type
FbEq 16b / 32b
DescriptionName / Range /
Selection
No.
Speed controller settings.Speed control25
See the control chain diagrams on pages 629 and 630.
- / real32Displays the speed controller output that is transferred to
the torque controller. See the control chain diagram on
page 630.
Torque reference
speed control
25.1
This parameter is read-only.
- / -Limited speed controller output torque. For scaling, see
parameter 46.3.
-1600.0 ... 1600.0 %
10.00; 5.00 (95.21
b1/b2) / real32
Defines the proportional gain (K
p
) of the speed controller.
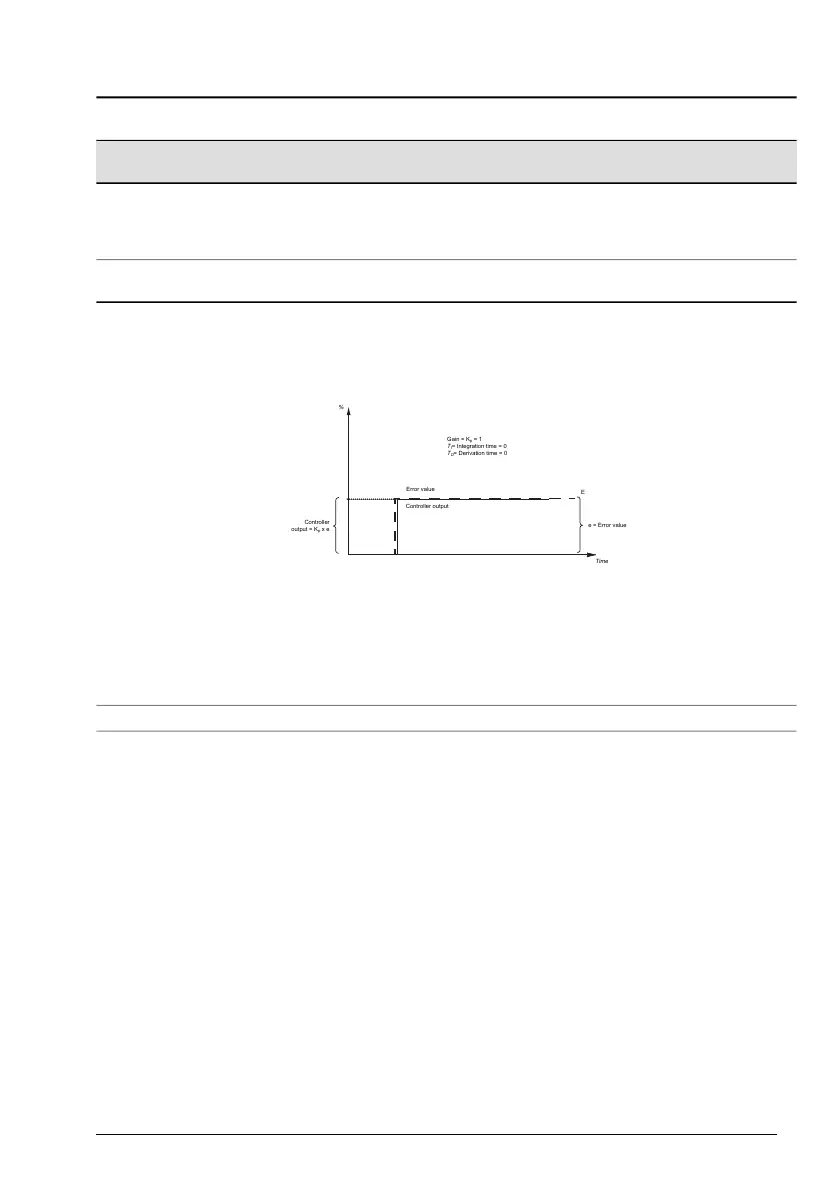
Too high a gain may cause speed oscillation. The figure
below shows the speed controller output after an error step
when the error remains constant.
Speed proportional
gain
25.2
Gain = K
p
= 1
T
I
= Integration time = 0
T
D
= Derivation time = 0
Controller output
Controller
output = K
p
x e
e = Error value
Time
%
E
Error value
If gain is set to 1.00, a 10% error (reference - actual value)
in the motor synchronous speed produces a proportional
term of 10%.
Note: This parameter is automatically set by the speed
controller autotune function. See section Speed controller
autotune (page 49).
100 = 1 / 100 = 1Proportional gain for speed controller.0.00 ... 250.00
Parameters 285