After these conditions have been fulfilled, autotuning can be activated by parameter
25.33 (or the signal source selected by it).
Autotune modes
Autotuning can be performed in three different ways depending on the setting of
parameter 25.34. The selections Smooth, Normal and Tight define how the drive torque
reference should react to a speed reference step after tuning. The selection Smooth
will produce a slow but robust response; Tight will produce a fast response but possibly
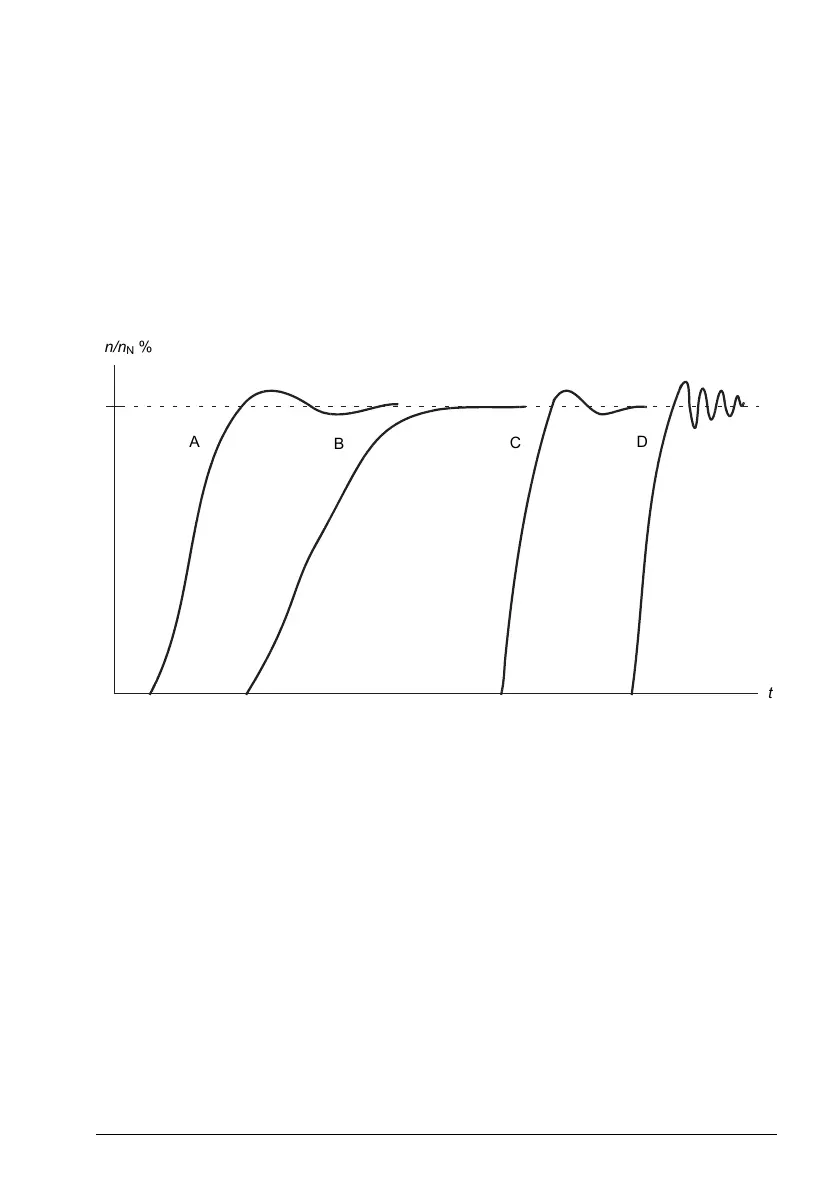
too high gain values for some applications. The figure below shows speed responses
at a speed reference step (typically 1…20%).
UndercompensatedA
Normally tuned (autotuning)B
Normally tuned (manually). Better dynamic performance than with BC
Overcompensated speed controllerD
Autotune results
At the end of a successful autotune routine, its results are automatically transferred into
parameters
•
25.2 (proportional gain of the speed controller)
•
25.3 (integration time of the speed controller)
•
25.37 (mechanical time constant of the motor and machine).
Nevertheless, it is still possible to manually adjust the controller gain, integration time
and derivation time.
Program features 51