•
Turning with Z-pulse mode is selected in 21.13 but no zero pulse is detected within
a revolution of the motor
•
The wrong motor type is selected in 99.3
• Motor ID run has failed.
Settings and diagnostics
Parameters: 6.21 Drive status word 3 (page 159), 21.13 Autophasing mode (page 257),
98.15 Position offset user (page 527) and 99.13 ID run requested (page 531).
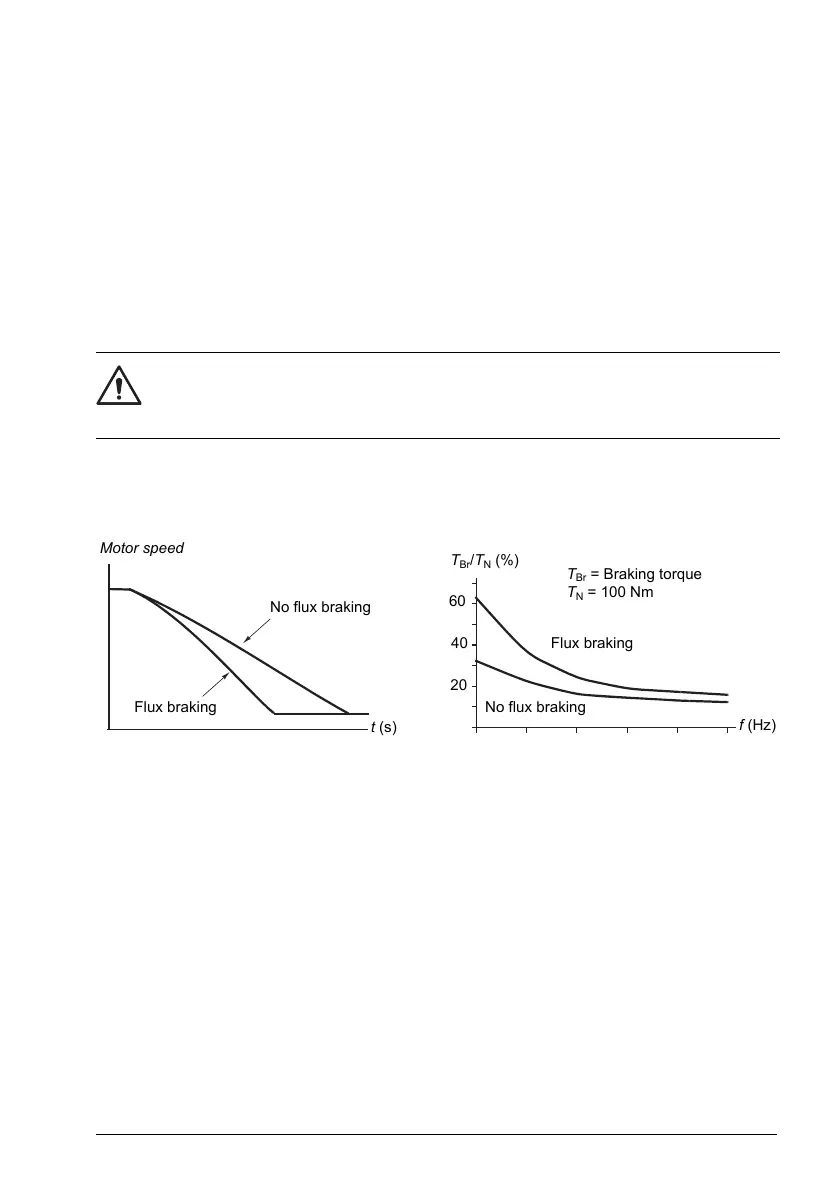
■ Flux braking
WARNING!
The motor needs to be rated to absorb the thermal energy generated by flux
braking.
The drive can provide greater deceleration by raising the level of magnetization in the
motor. By increasing the motor flux, the energy generated by the motor during braking
can be converted to motor thermal energy.
Motor speed
T
Br
/T
N
(%)
No flux braking
Flux braking
t (s)
f (Hz)
Flux braking
No flux braking
60
40
20
T
Br
= Braking torque
T
N
= 100 Nm
The drive monitors the motor status continuously, also during flux braking. Therefore,
flux braking can be used both for stopping the motor and for changing the speed. The
other benefits of flux braking are:
• The braking starts immediately after a stop command is given. The function does
not need to wait for the flux reduction before it can start the braking.
• The cooling of the induction motor is efficient. The stator current of the motor
increases during flux braking, not the rotor current. The stator cools much more
efficiently than the rotor.
• Flux braking can be used with induction motors and permanent magnet synchronous
motors.
Two braking power levels are available:
Program features 67