(Proximity switch) Source set by 90.67 1
0
(Initialization inhibit) Source set by 90.68 1
0
90.35 1
bit 4, Pos counter init ready 0
90.35 1
bit 5, Position counter re-init disabled 0
(Re-init request), Source set by 90.69 0
Drive fault 1
0
+2147483647
90.07
0
(initial value) Source set by 90.59
(by default, 90.58
-2147483648
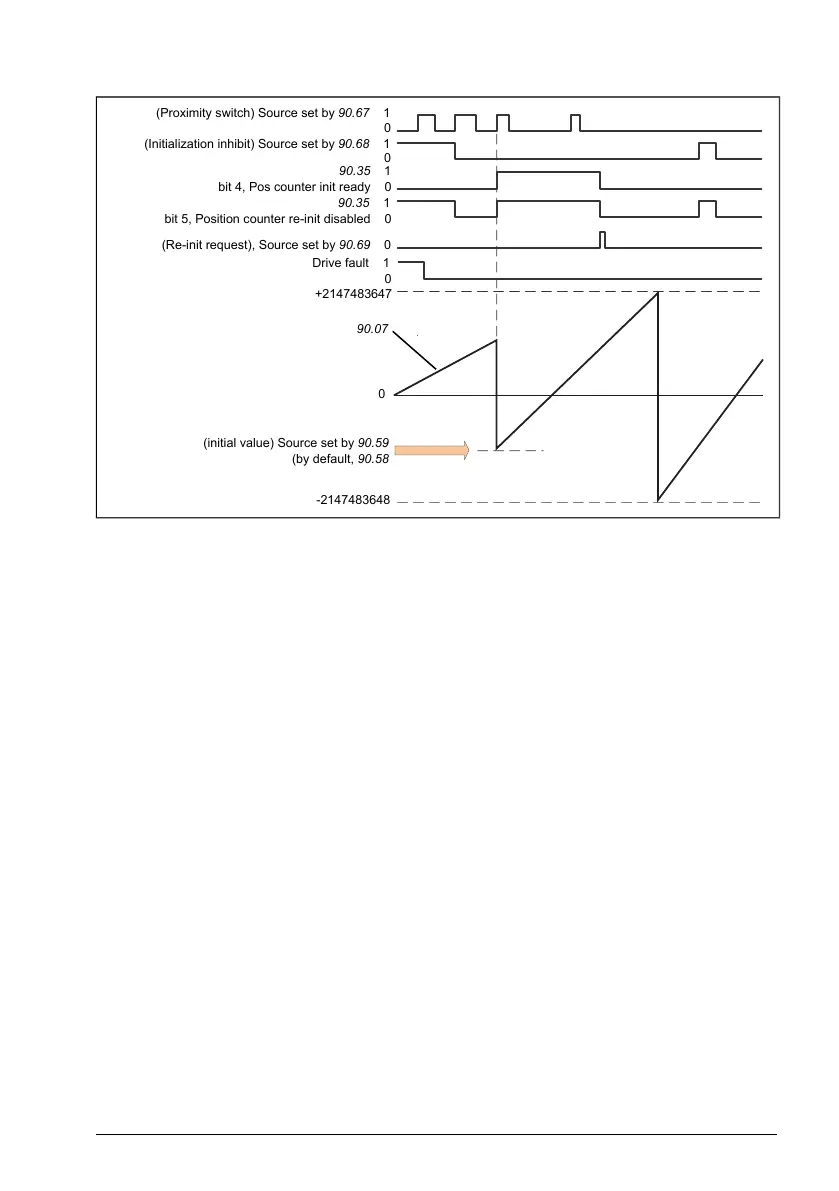
The position counter is initialized by setting a known physical position of the load into
the control program. The initial position (for example, the home/zero position, or the
distance from it) can be entered manually in a parameter (90.58), or taken from another
parameter. This position is set as the value of the position counter (90.7) when the
source selected by 90.67, such as a proximity switch connected to a digital input, is
activated. A successful initialization is indicated by bit 4 of 90.35.
Any subsequent initialization of the counter must first be enabled by 90.69. To define a
time window for initializations, 90.68 can be used to inhibit the signal from the proximity
switch. An active fault in the drive will also prevent counter initialization.
Encoder error handling
When an encoder is used for load feedback, the action taken in case of an encoder
error is specified by 90.55. If the parameter is set to Warning, the calculation will continue
smoothly using estimated motor position. If the encoder recovers from the error, the
calculation will smoothly switch back to encoder feedback. The load position signals
(90.4, 90.5 and 90.7) will continue to be updated all the time, but bit 6 of 90.35 will be
set to indicate potentially inaccurate position data. In addition, bit 4 of 90.35 will be
cleared upon the next stop as a recommendation to reinitialize the position counter.
Parameter 90.60 defines whether position calculation resumes from the previous value
over an encoder error or control unit reboot. By default, bit 4 of 90.35 is cleared after
an error, indicating that reinitialization is needed. With 90.60 set to Continue from previous
value, the position values are retained over an error or reboot; bit 6 of 90.35 is set
however to indicate that an error occurred.
Program features 57