System overview
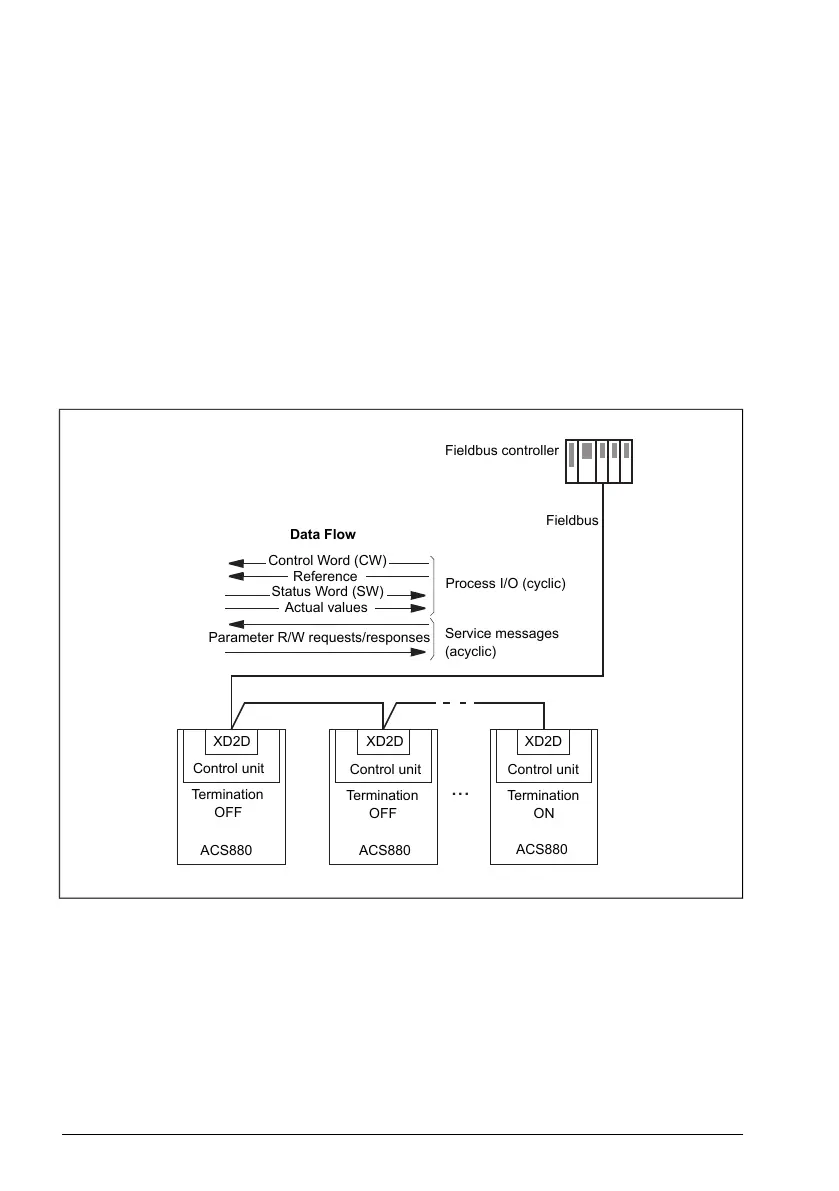
The drive can be connected to an external control system through a communication link
using either a fieldbus adapter or the embedded fieldbus interface.
The embedded fieldbus interface supports the Modbus RTU protocol. The drive control
program can handle 10 Modbus registers in a 10-millisecond time level. For example,
if the drive receives a request to read 20 registers, it will start its response within 22 ms
of receiving the request – 20 ms for processing the request and 2 ms overhead for
handling the bus. The actual response time depends on other factors as well, such as
the baud rate (a parameter setting in the drive).
The drive can be set to receive all of its control information through the fieldbus interface,
or the control can be distributed between the embedded fieldbus interface and other
available sources, for example, digital and analog inputs.
Fieldbus controller
Fieldbus
Process I/O (cyclic)
Service messages
(acyclic)
Control Word (CW)
Reference
Status Word (SW)
Actual values
Parameter R/W requests/responses
XD2DXD2D
XD2D
ACS880
ACS880ACS880
Termination
OFF
Termination
ON
Termination
OFF
Control unitControl unit
Control unit
Data Flow
Connecting the fieldbus to the drive
Connect the fieldbus to terminal XD2D on the control unit of the drive. See the appropriate
Hardware Manual for more information on the connection, chaining and termination of
the link.
Note: If the XD2D connector is reserved by the embedded fieldbus interface (parameter
58.1 Protocol enable is set to Modbus RTU), the drive-to-drive link functionality is
automatically disabled.
588 Fieldbus control through the embedded fieldbus interface (EFB)