Def / Type
FbEq 16b / 32b
DescriptionName / Range /
Selection
No.
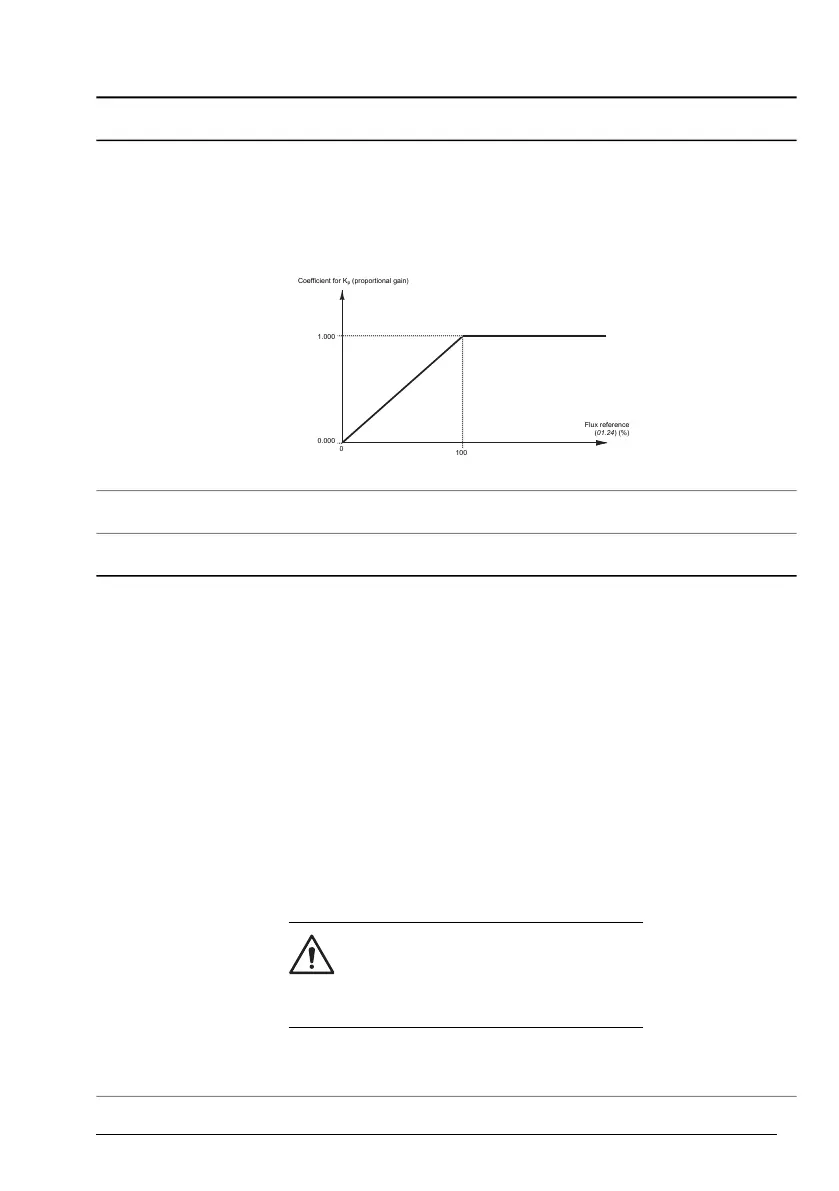
Enable / uint16Enables/disables speed controller adaptation based on
motor flux reference (1.24 Flux actual %).
The proportional gain of the speed controller is multiplied
by a coefficient of 0…1 between 0…100% flux reference
respectively.
See also the block diagram on page 630.
Coefficient for K
p
(proportional gain)
1.000
0.000
0
100
Flux reference
(01.24) (%)
Flux adaptation
enable
25.30
0Speed controller adaptation based on flux reference
disabled
Disable
1Speed controller adaptation based on flux reference
enabled.
Enable
Off / uint32Activates (or selects a source that activates) the speed
controller autotune function. See section Speed controller
autotune (page 49).
The autotune will automatically set parameters 25.2 Speed
proportional gain, 25.3 Speed integration time and 25.37
Mechanical time constant.
The prerequisites for performing the autotune routine are:
• the motor identification run (ID run) has been
successfully completed
•
the speed and torque limits (parameter group 30
Limits) have been set
•
speed feedback filtering (parameter group 90
Feedback selection), speed error filtering (24 Speed
reference conditioning) and zero speed (21 Start/stop
mode) have been set, and
• the drive has been started and is running in speed
control mode.
WARNING!
The motor and machinery will run against the
torque and speed limits during the autotune routine.
MAKE SURE IT IS SAFE TO ACTIVATE THE
AUTOTUNE FUNCTION!
The autotune routine can be aborted by stopping the drive.
0→1 = Activate speed controller autotune
Note: The value does not revert to 0 automatically.
Speed controller
autotune
25.33
Parameters 293