Def / Type
FbEq 16b / 32b
DescriptionName / Range /
Selection
No.
2.50; 5.00 s (95.21
b1/b2) s / real32
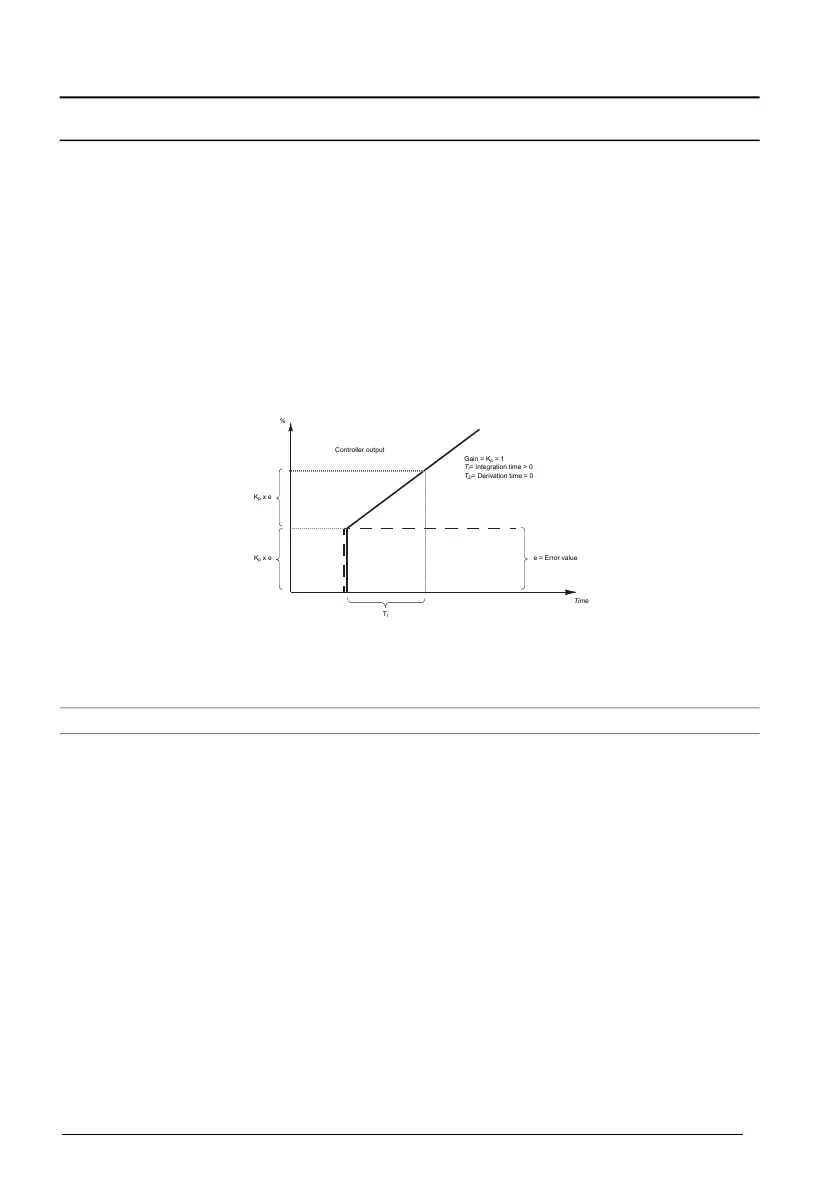
Defines the integration time of the speed controller. The
integration time defines the rate at which the controller
output changes when the error value is constant and the
proportional gain of the speed controller is 1. The shorter
the integration time, the faster the continuous error value
is corrected.
Setting the integration time to zero disables the I-part of
the controller. This is useful to do when tuning the
proportional gain; adjust the proportional gain first, then
return the integration time.
The integrator has anti-windup control for operation at a
torque or current limit.
The figure below shows the speed controller output after
an error step when the error remains constant.
Controller output
Gain = K
p
= 1
T
I
= Integration time > 0
T
D
= Derivation time = 0
e = Error value
Time
%
K
p
x e
K
p
x e
T
I
Note: This parameter is automatically set by the speed
controller autotune function. See section Speed controller
autotune (page 49).
Speed integration
time
25.3
10 = 1 s / 100 = 1 sIntegration time for speed controller.0.00 ... 1000.00 s
286 Parameters