Def / Type
FbEq 16b / 32b
DescriptionName / Range /
Selection
No.
0.000 s / real32Defines the derivation time of the speed controller.
Derivative action boosts the controller output if the error
value changes.
The longer the derivation time, the more the speed
controller output is boosted during the change. If the
derivation time is set to zero, the controller works as a PI
controller, otherwise as a PID controller. The derivation
makes the control more responsive for disturbances. For
simple applications (especially those without an encoder),
derivative time is not normally required and should be left
at zero.
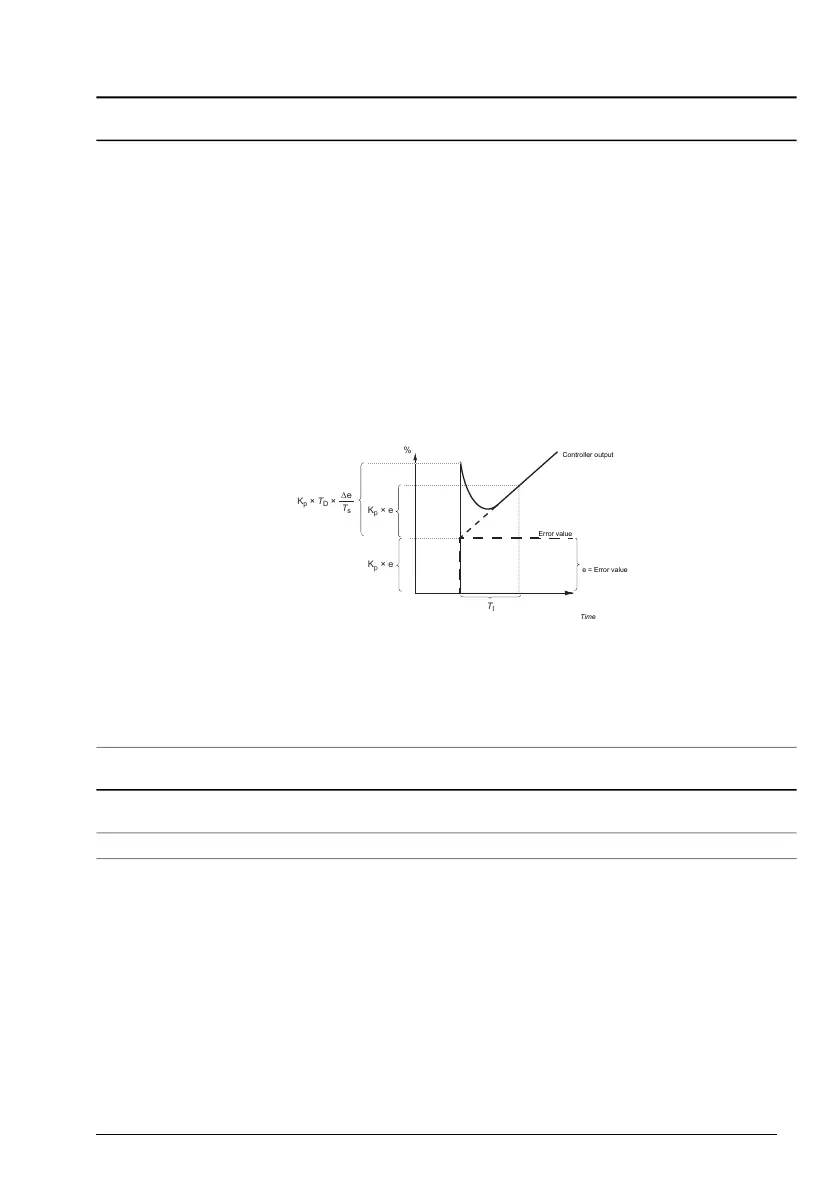
The figure below shows the speed controller output after
an error step when the error remains constant. The speed
error derivative must be filtered with a low pass filter to
eliminate external disturbances.
K
p
×e
K
p
× T
D
×
'e
T
s
T
I
K
p
×e
%
Controller output
Error value
e = Error value
Time
Gain = K
p
= 1
T
I
= Integration time > 0
T
D
= Derivation time > 0
T
s
= Sample time period = 500 μs
Δe = Error value change between two samples
Speed derivation time25.4
1000 = 1 s / 1000 = 1
s
Derivation time for speed controller.0.000 ... 10.000 s
8 ms / real32Defines the derivation filter time constant. See parameter
25.4 Speed derivation time.
Derivation filter time25.5
1 = 1 ms / 1 = 1 msDerivation filter time constant.0...10000 ms
Parameters 287