Def / Type
FbEq 16b / 32b
DescriptionName / Range /
Selection
No.
- / real32Defines the derivation time for acceleration(/deceleration)
compensation. In order to compensate for a high inertia
load during acceleration, a derivative of the reference is
added to the output of the speed controller. The principle
of a derivative action is described under parameter 25.4
Speed derivation time.
Note: As a general rule, set this parameter to the value
between 50 and 100% of the sum of the mechanical time
constants of the motor and the driven machine.
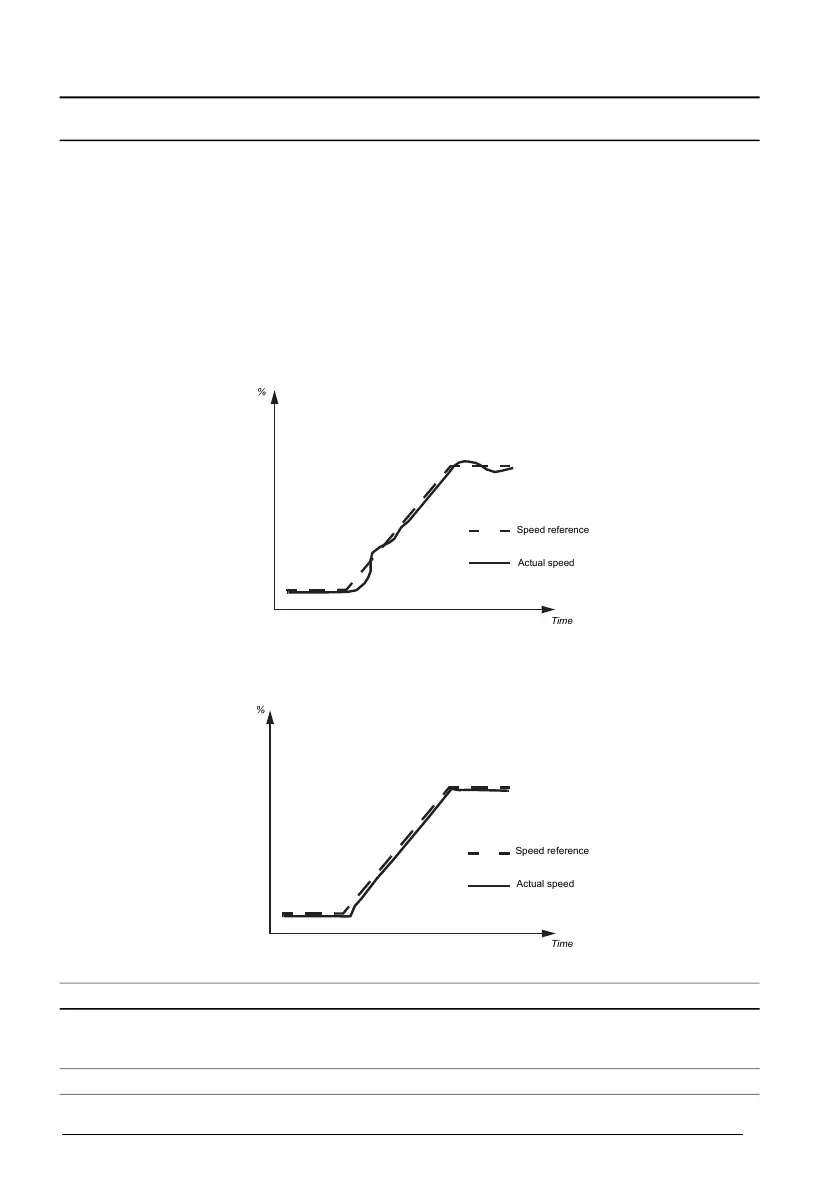
The figure below shows the speed responses when a high
inertia load is accelerated along a ramp.
No acceleration compensation:
Speed reference
Actual speed
Time
%
Acceleration compensation:
%
Time
Speed reference
Actual speed
Acc comp derivation
time
25.6
10 = 1 s / 100 = 1 sAcceleration compensation derivation time.0.00 ... 1000.00 s
8.0 ms / real32Defines the acceleration (or deceleration) compensation
filter time constant. See parameters 25.4 Speed derivation
time and 25.6 Acc comp derivation time.
Acc comp filter time25.7
1 = 1 ms / 10 = 1 msAcceleration/deceleration compensation filter time.0.0 ... 1000.0 ms
288 Parameters
 Loading...
Loading...


















