accuracy. Hall sensors generate so-called commutation pulses that change their state
six times during one revolution, so it is only known within which 60° sector of a complete
revolution the initial position is.
Many encoders give a zero pulse (also called Z-pulse) once during each rotation. The
position of the zero pulse is fixed. If this position is known with respect to zero position
used by motor control, the rotor position at the instant of the zero pulse is also known.
Using the zero pulse improves the robustness of the rotor position measurement. The
rotor position must be determined during starting because the initial value given by the
encoder is zero. The autophasing routine determines the position, but there is a risk of
some position error. If the zero pulse position is known in advance, the position found
by autophasing can be corrected as soon as the zero pulse is detected for the first time
after starting.
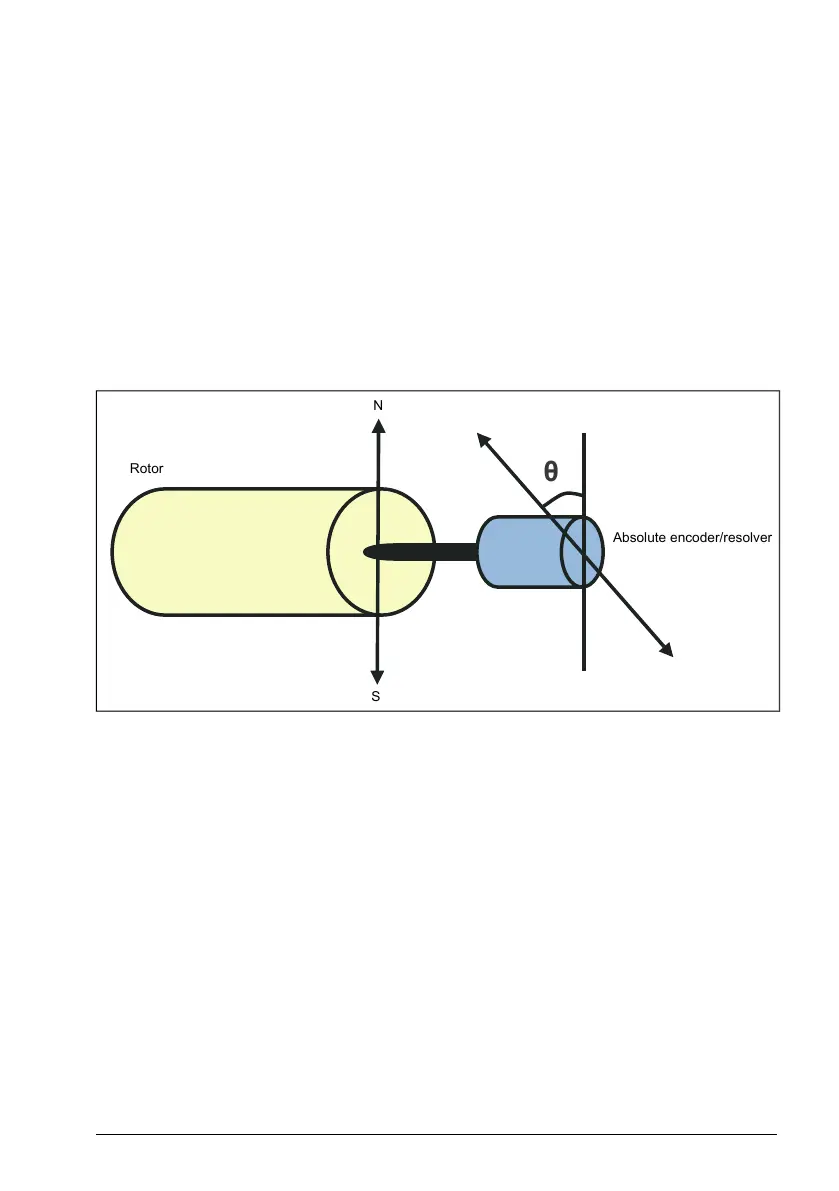
Absolute encoder/resolver
Rotor
N
S
The autophasing routine is performed with permanent magnet synchronous motors and
synchronous reluctance motors in the following cases:
1. One-time measurement of the rotor and encoder position difference when an absolute
encoder, a resolver, or an encoder with commutation signals is used
2. At every power-up when an incremental encoder is used
3. With open-loop motor control, repetitive measurement of the rotor position at every
start
4. When the position of the zero pulse must be measured before the first start after
power-up.
Note: In closed-loop control, autophasing is performed automatically after the motor
identification run (ID run). Autophasing is also performed automatically before starting
when necessary.
Program features 65