FC 300 Design Guide
How to Program
The table shows the number of poles for norma l
speed ranges of various motor types. Define motors
designed for other frequencies separately. The
motor pole value is always an even number, because
it refers to the total number of poles, not pairs of
poles. The adjustable frequency drive creates the
initial setting of par. 1-39 based on par. 1-23 Motor
Frequency and p ar. 1-25 Motor Nominal Spee d.
This parameter cannot be adjusted while
the motor is running.
" 1-4* LCP Keypad
Enable or disabl e the individual keys on
the LCP panel.
1-40 Back EM F at 1000 RPM
Range:
10 - 10 00 V
*
500 V
Function:
Set the nominal back EMF for the motor when
running at 1000 RPM. This parameter is only
active when par. 1-10 Motor Design is set toPM
motor [1](PermanentMagnetMotor).
This parameter is available for FC 302 only.
This parameter cannot be adjusted while
the motor is running.
1-41 Motor Angle Offset
Range:
0 - 65 535 N/A
*
0N/A
Function:
Enter the correct offset angle between the PM
motor and the inde x position (si ngle- turn) of the
attached enc o der or resolver. The value range of
0–65535correspondsto0-2*pi(radians). To
obtain the offset angle value: After drive start-up
apply DC-hold and e nter the value of par. 16-20
Motor Angle into this parameter.
This p arameter is only active when par. 1-10
Motor Design is set to PM, non-salient SPM
[1] (Permanent Magnet M otor).
This parameter cannot be adjusted while
the motor is running.
" 1-5* Load Indep. Setting
Parameters for setting the load-independen t
motor settings.
1-50 Motor Magnetization at Zero Speed
Range:
0-300%
*
100%
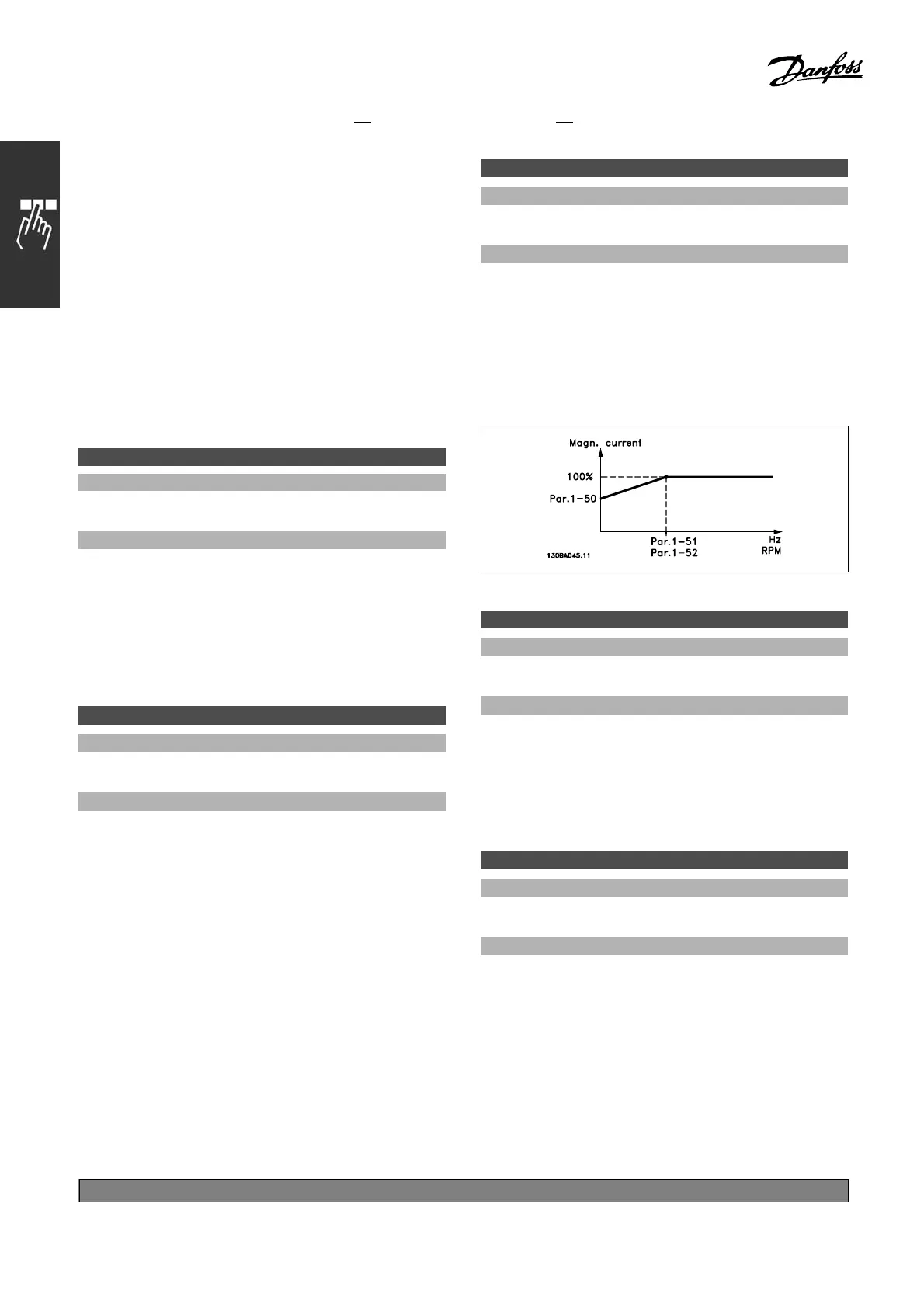
Function:
Use this par. along with par. 1-51 Min Speed Normal
Magnetising [RPM] to obtain a different therm al
load on the motor when running at low s peed.
Enter a value which is a p ercentage of the rated
magnetizing current. If the setting is too low, the
torque on the motor shaft may be reduced.
1-51 Min Speed Normal Magnetizing [RPM]
Range:
10 - 300 RPM
*
15 RPM
Function:
Set the required spe ed for normal magnetizing
current. If the speed is set lowe r than the motor
slip speed, par. 1-50 Motor Magnetization at Zero
Speed and pa r. 1-51 are of no significance.
Use this p ar. along with par. 1-50. See
drawing for par. 1-50.
1-52 Min Speed No r mal Magnetizing [Hz]
Range:
0-10Hz
*
0Hz
Function:
Set the required frequency for normal magnetising
current. If the frequency is set lower than the
motor slip frequency, par. 1-50 Motor Magnetisation
at Zero Speed and par. 1-51 Min Speed Normal
Magnetising [RP M].areinactive.
Use this p ar. along with par. 1-50. See
drawing for par. 1-50.
*
default setting ()display text []value for use in communication via serial communication port
164
MG.33.B
6.22 - V LT is a registered Danfoss trademark

 Loading...
Loading...











