FC 300 Design Guide
Application Examples
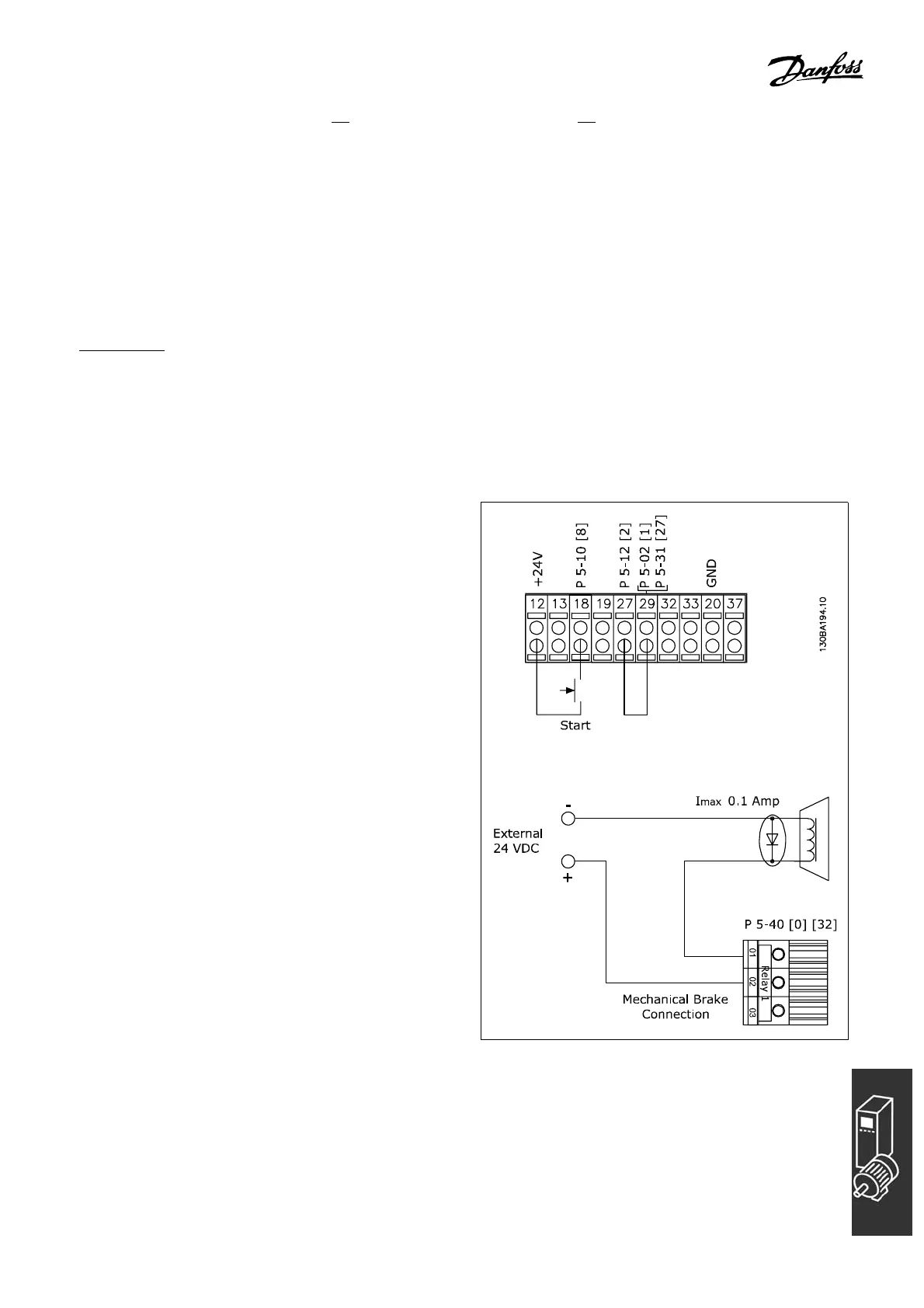
" Programming of Torque Limit and Stop
In applications with an external electrome chanical brake, such as hoisting applications,
it is possible to stop the adjustable frequency d rive via a "standard" stop command and
simultaneously activate the external electromechanical brake.
The example given below illustrates the programming of adjustable frequenc y drive connections.
The external brake can b e connected to relay 1 or 2, see p aragraph Control of Mecha nical Brake.
Program terminal 27 to C oas t inverse [2] or Coast and reset inv. [3], and program termina l
29 to Terminal mode 29 Output [1] and Torque li mit stop [27].
D
escription:
If a stop command is active via terminal 18 and the adjustable frequency drive i s not
at the torque limit, the motor ramps down to 0 Hz.
If the adjustable frequency drive is at the torque lim it and a stop command is activated, terminal 2 9 Output
(programmed to Torque limit stop [27]) is activated. The sig nal to terminal 27 l changes from "logic 1"
to "logic 0", and the motor starts to coast, thereby ensuring that the hois t stops even if the ad
justable
frequency drive itself cannot handle the requiredtorque(i.e. duetoexcessiveoverload).
- Start/stop via terminal 18
Par. 5-10 Start [8]
- Quickstop via terminal 27
Par. 5-12 Coast inverse [2]
- Terminal 29 Output
Par. 5-02 Terminal 29 Mode Output [1]
Par. 5-31 Torque limit stop [27]
- Relay output [0] (Relay 1)
Par. 5-40 Mech. Brake Control [32 ]
131
MG.33.B6.22 - VLT is a registered Danfoss trademark

 Loading...
Loading...











