1- 2
1.1.2 Features
Positioning function features the followings.
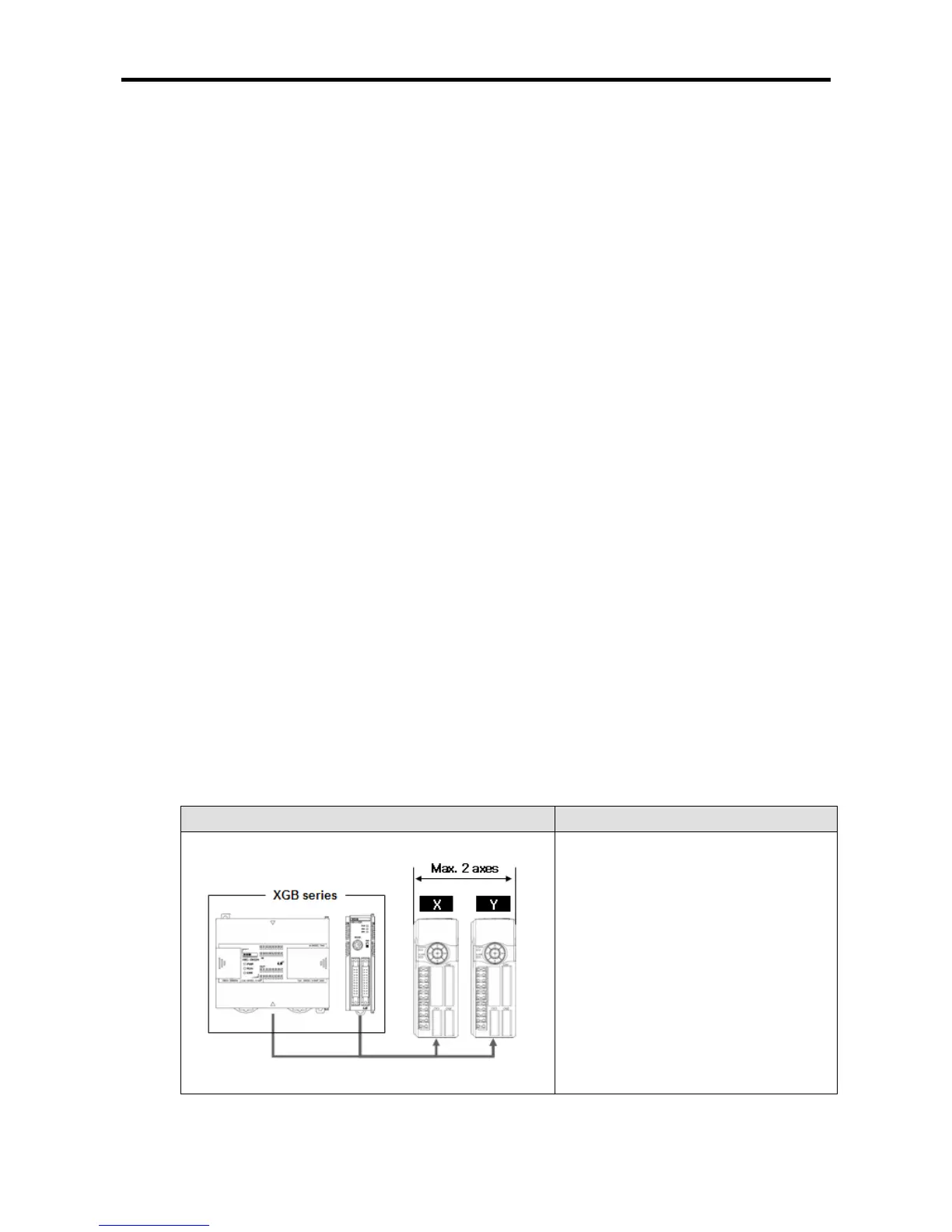
(1) Max. two axis, 100kpps positioning
- XGB PLC can execute positioning of up to 2 axes with up to 100kpps.
(2) Diversity of positioning function
- XGB PLC contains various functions necessary for position system such as position control at any
temporary position or constant speed operation.
(a) Operation data containing position address, operation method and operation pattern may be set
up to 80 steps per axis (based on “H” type). It executes position function by using this operation
data.
(b) Linear control is available by using each operation data
- The control can also perform single position control by one operation data and continuous
position control by several operation data
(c) linear interpolation control is available.
(d) According to operation data and control types designated by parameters, position control, speed
control, position/speed switching control and position/speed switching control are available
(e) It also provides various home return functions.
1) Home return can be chosen among the following three.
▪ Origin detection after DOG Off
▪ When DOG On, Origin detection after deceleration
▪ Origin detection by DOG
2) temporary position can be set as machine’s origin by using floating origin setting function.
(3) Easy maintenance
- It saves data such as position data and parameter into flash memory of main unit permanently.
- The modified data during positioning can be preserved in the flash memory by application
instruction (WRT/APM_WRT instruction).
(4) XG5000 can perform self-diagnosis, monitor and test.
(a) Diagnosing of I/O signal line.
(b) It can test all functions of built-in positioning or check the current operation status without
program through special module monitoring
(c) It is easy to take action because the user can check error by error occurrence flag (Ch0:
K4201, ,%KX6721 Ch1: K4301, %KX6881) and error code (Ch0: K427, %KW427 Ch1:
K437, %KW437) easily.
XGB positioning system Reference
•For parameter setting, refer to Ch3.2 and
for operation data setting, refer to Ch3.3.
•For instruction of positioning, refer to Ch5.
•For I/O signal, refer to Ch1.4.