Chapter 5 Positioning Instructions
5 - 3
5.2 Details of Positioning Instructions (In case of XBC/XBM)
5.2.1 Origin Return Instructions
• Origin return is sued to check the origin of the machine when power is supplied to the machine in
general. If the origin return instruction is given, it is executed depending on the setting of the origin
return parameter. (for setting of the origin return parameter, refer to 3.2.4.)
Type Items Description Remark
origin
return
parameter
origin return method Set origin return method
Starting direction during origin return
operation
Origin address origin address in detecting origin
high/low speed during origin return
operation
origin return dec./acc. time dec./acc. time during origin return operation
origin return deceleration
time
Set deceleration time during origin return
operation
Time it takes to remove remaining pulse of
the deviation counter right after origin
• In general, the origin return divides into two ways, one of which is using the DOG and the other is
not using it. In XGB positioning function, the following three ways can be used that use the DOG.
(for details of the origin return method, refer to 3.1.9.)
Origin return method Necessary input signals Remark
Detect origin after DOG turns Off
(0: DOG/origin (OFF))
DOG signal, origin signal
( ) is what is displayed in
the positioning
origin/manual parameter.
When DOG is On, detect the origin
DOG signal, origin signal
Detect the origin by DOG
(2: DOG)
DOG signal
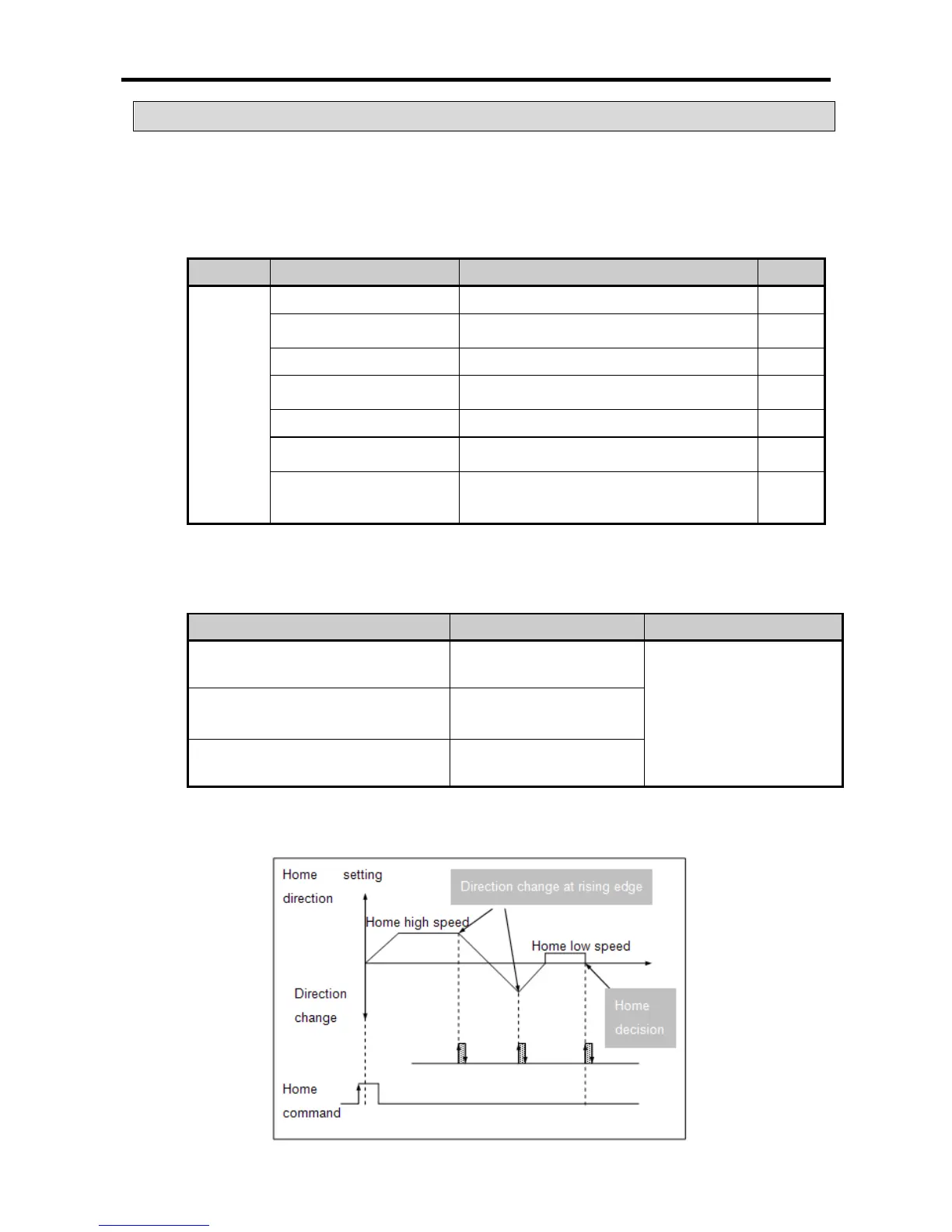
• The following diagram is an example of origin detection by DOG among the three ways of origin
return.