Chapter 7 Program Examples of Positioning
7 - 25
(3) Operation Data Setting
Step No.
coordinat
es
Control
pattern
Operation
pattern
Operation
type
Repeat step
Target position
[pulse]
M code
Acc./Dec.
No.
Operation
speed
[pls/s]
Dwell time
[㎳]
1
Absolut
e
Speed
control
End Single 0 10000 0 1 1000 100
(4) Operation Sequence
•P0009/%IX0.1.1 (floating origin) switch On : set as the floating origin at the current position.
•P000A/%IX0.1.2 (indirect start) switch On : axis X indirectly starts step 1 and starts speed control.
•P000B/%IX0.1.7 (emergency stop) switch On : axis X does emergency stop without deceleration
and the output is inhibited.
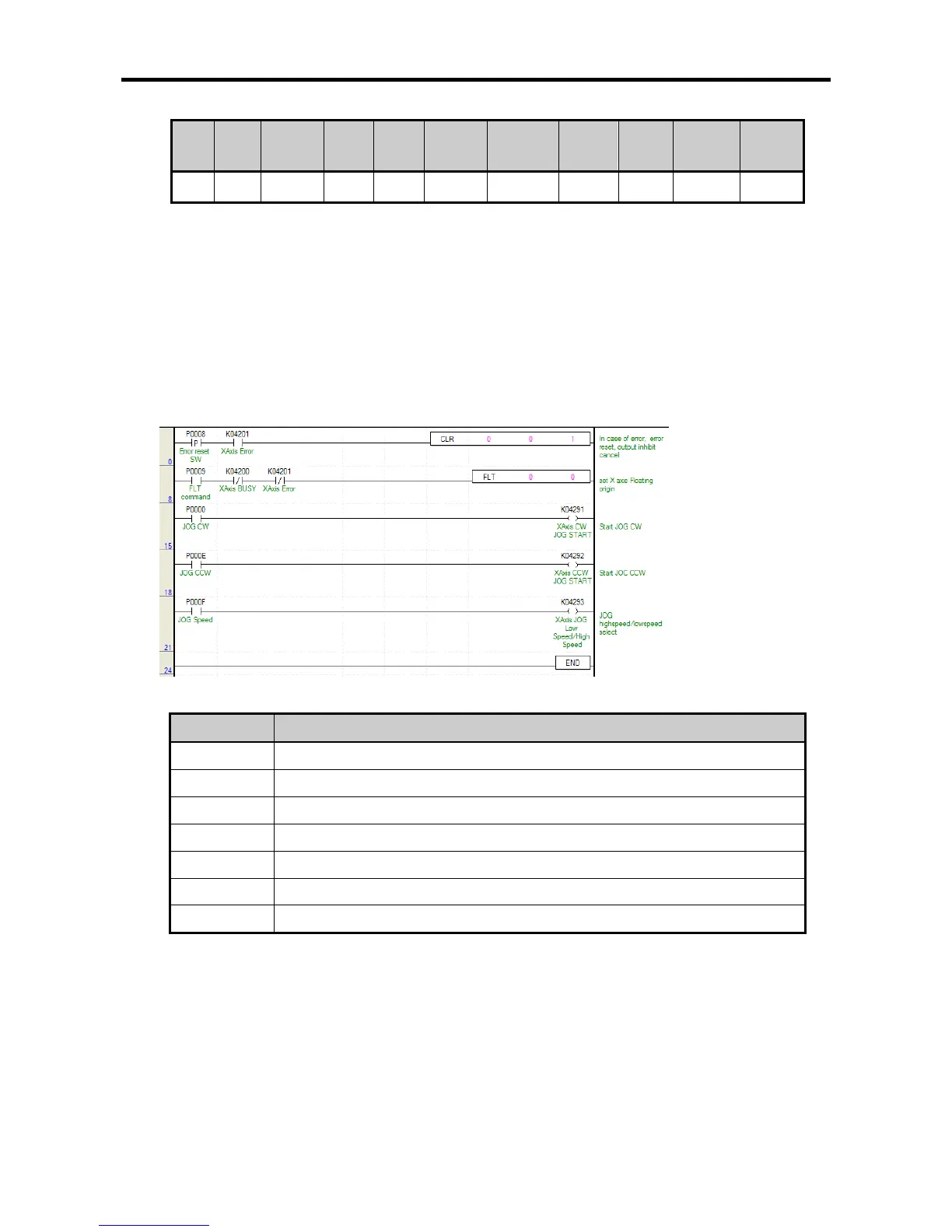
7.2.10 Jog Operation
• The program example of jog operation is as follows.
(1) XBM/XBC
(a) Devices Used
Device Description
P0008 Axis X error reset, output inhibition cancel switch
P0009 axis X floating origin switch
P000D axis X jog normal direction start switch
P000E axis X jog reverse direction start switch
P000F Switch for low/high speed selection of axis X jog
K4200 Signal during axis X operation
K4201 Error signal of axis X