Chapter 5 Positioning Instructions
5 - 82
5.3.14 Speed Override Function Block
•Speed override instruction (APM_SOR) changes the operating speed of the axis presently in
positioning operation to the speed set up in the instruction line. For the details of speed override
function, see 3.1.10.
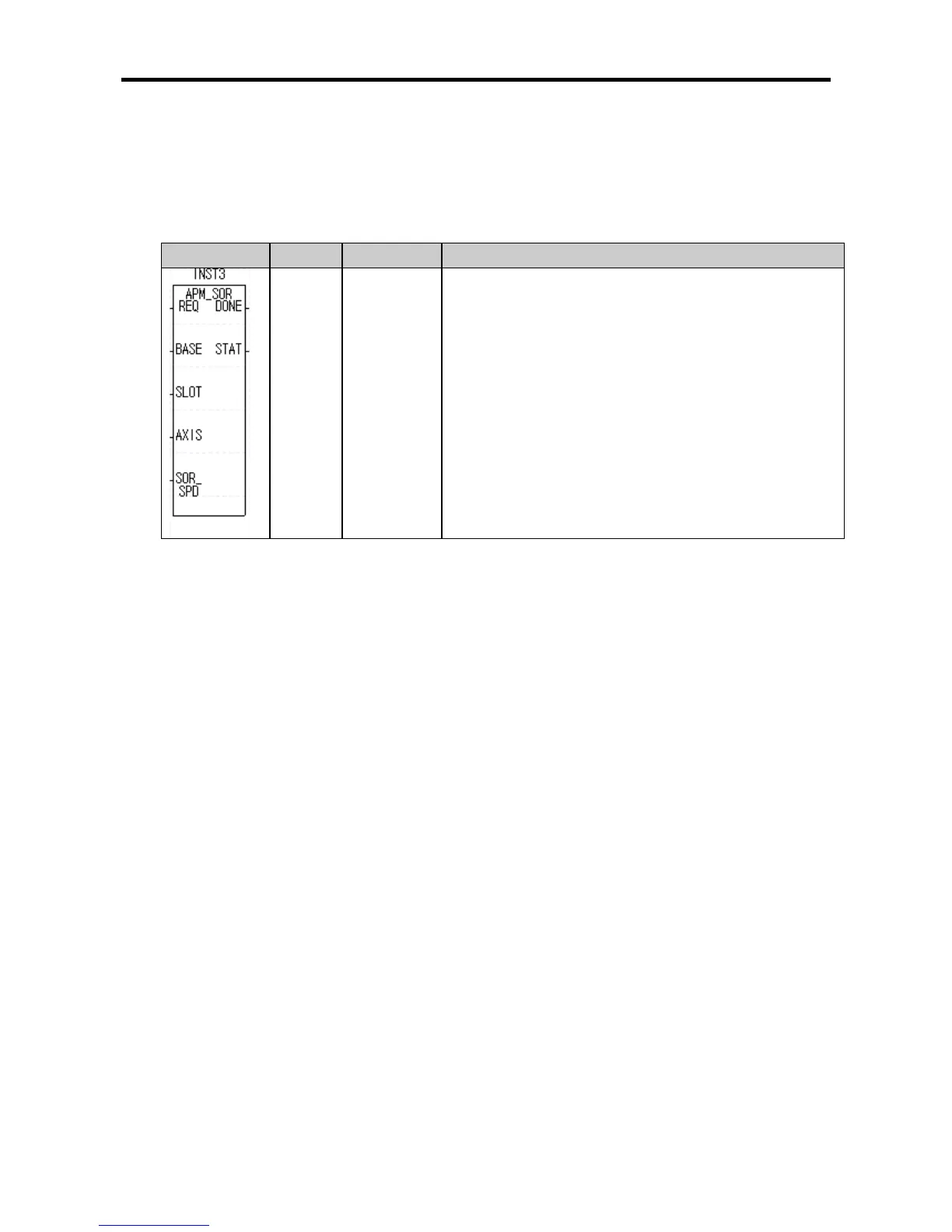
(1) Speed Override Instruction (APM_SOR)
Form Variable Data Type Description
SOR_
SPD
UDINT
Operating Speed
● Setting range: 1~100,000
(a) Function
•This instruction provides speed override reference to the XGB internal positioning.
•At the rising edge of the input condition, the axis designated to be AXIS changes its operating
speed to the speed set up in SOR_SPD.
•Speed override instruction is available for the acceleration, constant speed, and deceleration
sections of operation patterns. If speed override instruction is executed during deceleration or
dwelling, error code 377 is outputted to STAT, and the present operating step does not stop and
continues running.