Chapter 5 Positioning Instructions
5 - 83
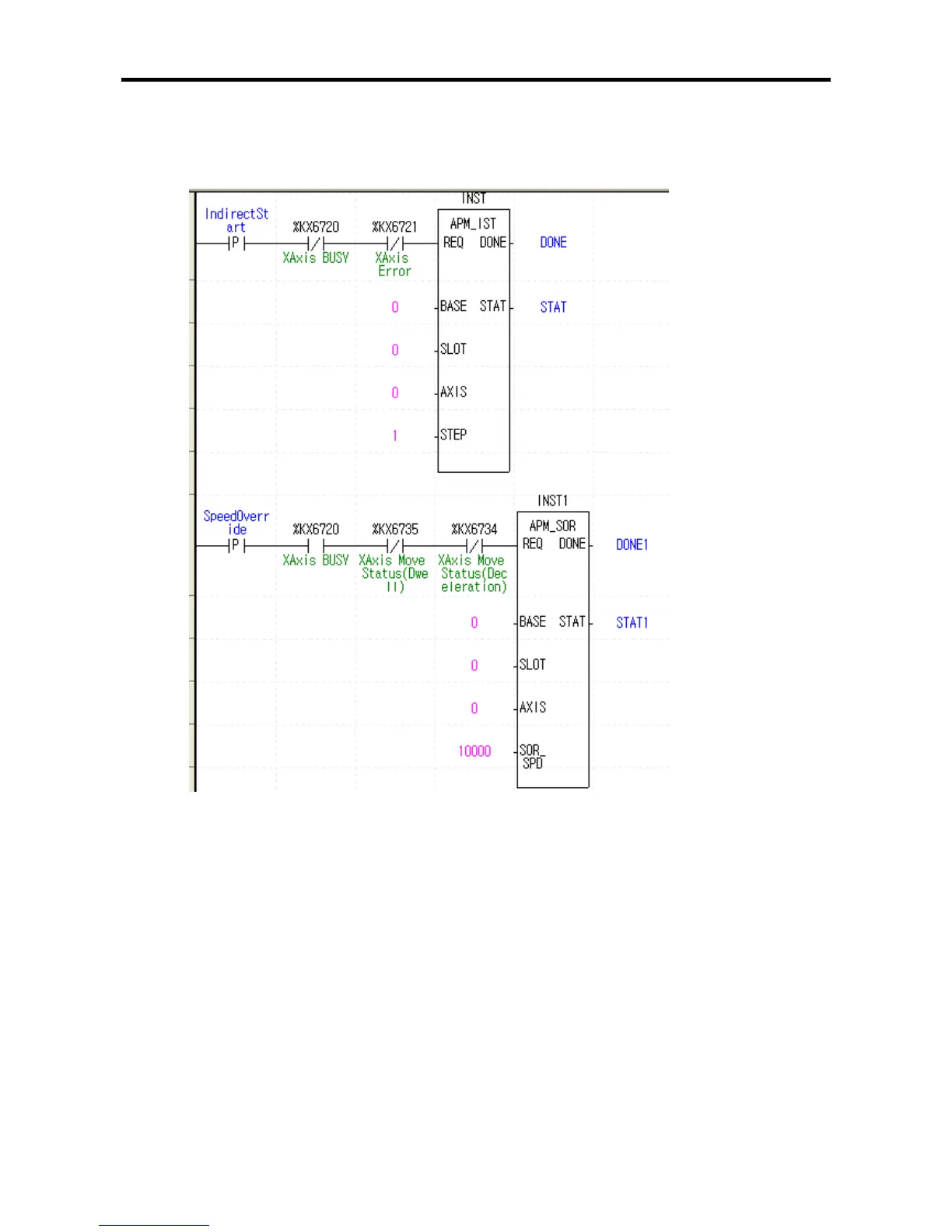
(2) Sample Instruction
•The sample program below shows exemplary operation of speed override instruction.
(c) Sample Program
(d) Program Operation
•At the rising edge of the indirect start-up signal used as the reference for indirect start up signal,
positioning X-axis is started up indirectly by the operating step No. 1.
•If the rising edge of the ‘speed override reference’ signal used as the reference signal for the speed
override instruction occurs during operation, the operation continues by changing the operating
speed of the present operation step to 10,000[pps]. Take care that the speed value of the No.1
step set up with the positioning parameter itself is not changed.
•If speed override instruction is executed while the operation state is in deceleration or dwelling, error
code 377 is outputted to STAT. To prevent this, the start-up contact should be connected with the
X-axis dwell status flag as normally closed (B contact) in the program.