Chapter 3 Before positioning
3- 49
3.4 Positioning Status Monitoring and Area K for Input and Output
The XGB built-in positioning function controls positioning by using area K for positioning and the
parameters. This Chapter describes area K for positioning.
For the relations between the XGB built-in positioning parameters and area K, see 3.2.2.
XGB built-in positioning area K divides into the bit flag, word, and double word flag. The flag in turn
divides into the status monitoring flag area (for read only) and the flag for instruction and command (for
read and write).
3.4.1 Status Monitoring and Flag for Positioning
This chapter describes the XGB built-in status monitoring flag for positioning (for read only).
The status monitoring flag divides into bit, word, and double word.
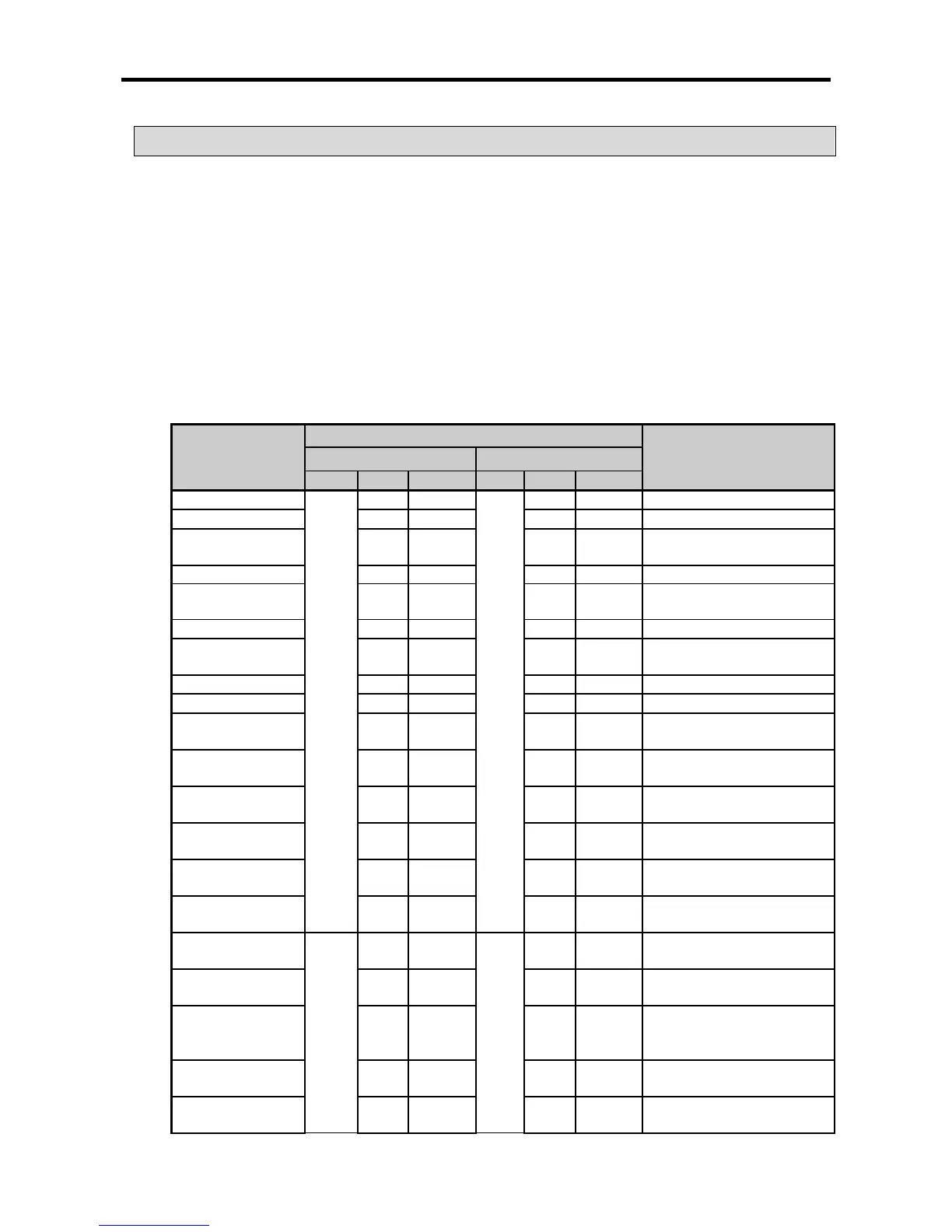
(1) Bit Area Flag
(a) XBM/XBC bit area flag
Variables
Device Area
Status
Axis X Axis Y
Word Bit Address Word Bit Address
In operation
K420
0 K4200
K430
0 K4300 0: stop, 1: operation
Error 1 K4201 1 K4301 0: no error, 1: error
Positioning
completed
2 K4202 2 K4302 0: not completed, 1: completed
M code signal 3 K4203 3 K4303 0:M code Off, 1:M code On
Origin settled 4 K4204 4 K4304
0: origin not decided, 1: origin
decided
No pulse output 5 K4205 5 K4305 0: output available, 1: no output
Stopped 6 K4206 6 K4306
0: not stopped
1: stopped
Upper limit detected 8 K4208 8 K4308 0: undetected, 1: detected
Lower limit detected 9 K4209 9 K4309 0: undetected, 1: detected
Emergency stop A K420A A K430A
0: normal, 1: abnormally
stopped
Normal/backward
rotation
B K420B B K430B
0: normal direction, 1:
backward direction
Operation
(acceleration)
C K420C C K430C
0: not accelerated, 1:
accelerated
Operation
(constant speed)
D K420D D K430D
0: not constant speed, 1:
constant speed
Operation
(deceleration)
E K420E E K430E
0: not decelerated, 1:
decelerated
Operation (dwell) F K420F F K430F
0: not during dwell, 1: during
dwell
Operation
(positioning)
K421
0 K4210
K431
0 K4310
0: position not controlled
1: position controlled
Operation
(speed control)
1 K4211 1 K4311
0: speed not controlled
1: speed controlled
Operation control
(straight
interpolation)
2 K4212 2 K4312
0: interpolation not controlled
1: interpolation controlled
Return to origin 5 K4215 5 K4315
0: not returning to origin
1: returning to origin
Position
synchronization
6 K4216 6 K4316
0: position not synchronized
1: position synchronized