Chapter 3 Before positioning
3- 50
Speed
synchronization
7 K4217 7 K4317
0: speed not synchronized
1: speed synchronized
Jog low speed 8 K4218 8 K4318
0: jog not at low speed
1: jog at low speed
Jog high speed 9 K4219 9 K4319
0: jog not at high speed
1: jog at high speed
Inching operation A K421A A K431A
0:not during inching operation
1: during inching operation
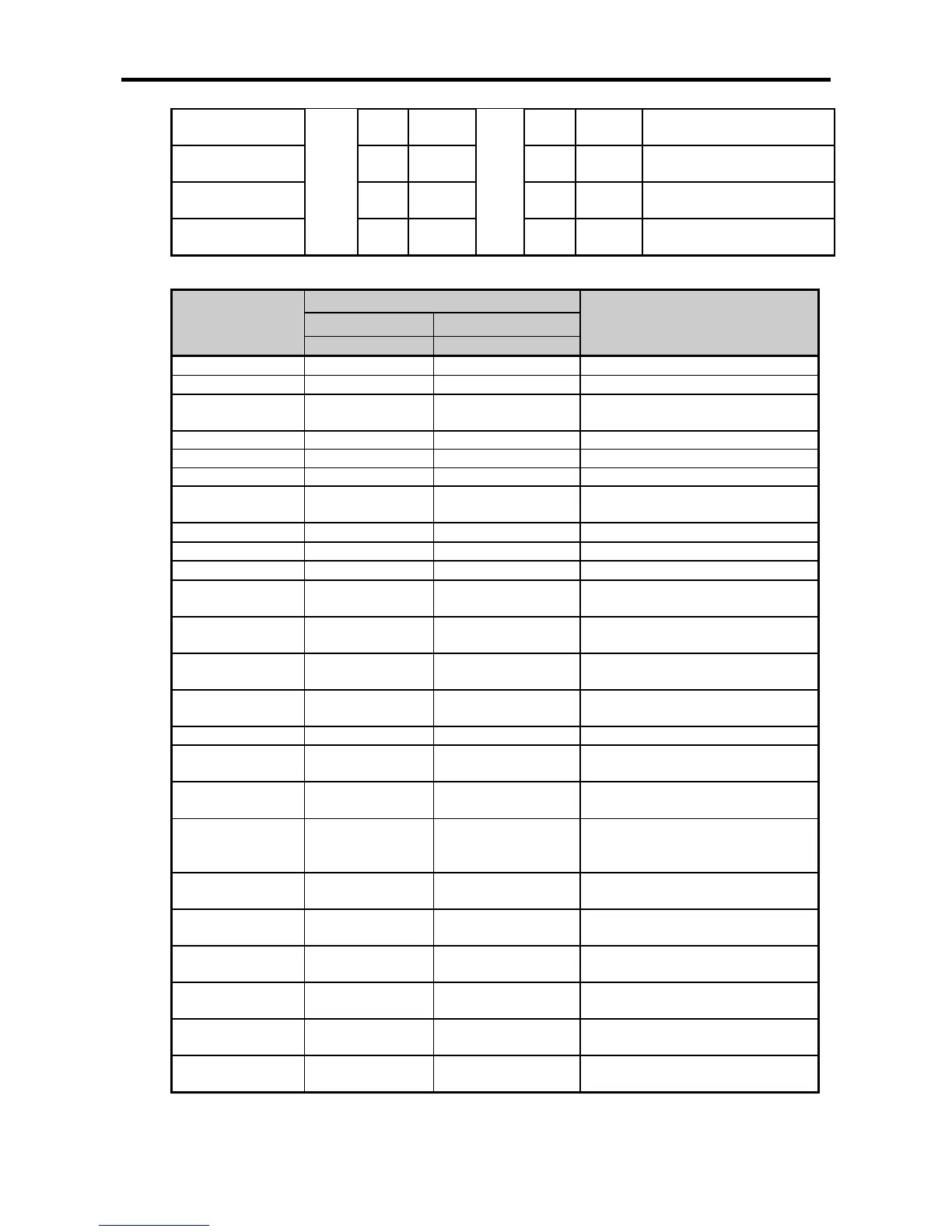
(a) XEC bit area flag
Variables
Device area
Status
Axis X Axis Y
Address Address
In operation %KX6720 %KX6880 0: stop, 1: operation
Error %KX6721 %KX6881 0: no error, 1: error
Positioning
completed
%KX6722 %KX6882 0: not completed, 1: completed
M code signal %KX6723 %KX6883 0:M code Off, 1:M code On
Origin settled %KX6724 %KX6884 0: origin not decided, 1: origin decided
No pulse output %KX6725 %KX6885 0: output available, 1: no output
Stopped %KX6726 %KX6886
0: not stopped
1: stopped
Upper limit detected %KX6728 %KX6888 0: undetected, 1: detected
Lower limit detected %KX6729 %KX6889 0: undetected, 1: detected
Emergency stop %KX6730 %KX6890 0: normal, 1: abnormally stopped
Normal/backward
rotation
%KX6731 %KX6891
0: normal direction, 1: backward
direction
Operation
(acceleration)
%KX6732 %KX6892 0: not accelerated, 1: accelerated
Operation
(constant speed)
%KX6733 %KX6893
0: not constant speed, 1: constant
speed
Operation
(deceleration)
%KX6734 %KX6894 0: not decelerated, 1: decelerated
Operation (dwell) %KX6735 %KX6895 0: not during dwell, 1: during dwell
Operation
(positioning)
%KX6736 %KX6896
0: position not controlled
1: position controlled
Operation
(speed control)
%KX6737 %KX6897
0: speed not controlled
1: speed controlled
Operation control
(straight
interpolation)
%KX6738 %KX6898
0: interpolation not controlled
1: interpolation controlled
Return to origin %KX6741 %KX6901
0: not returning to origin
1: returning to origin
Position
synchronization
%KX6742 %KX6902
0: position not synchronized
1: position synchronized
Speed
synchronization
%KX6743 %KX6903
0: speed not synchronized
1: speed synchronized
Jog low speed %KX6744 %KX6904
0: jog not at low speed
1: jog at low speed
Jog high speed %KX6745 %KX6905
0: jog not at high speed
1: jog at high speed
Inching operation %KX6746 %KX6906
0:not during inching operation
1: during inching operation