Chapter 3 Before positioning
3- 22
(2) Stop Process and Priority
(a) Stop Process
• Since positioning operation is not complete if it stops due to deceleration stop instruction, After
Mode among M code modes is not “On” because it does not generate positioning completion
signal.
• After then, if indirect start instruction (step number = current step number) is generated,
Absolute method operation operates as much as the remaining distance of the current operation
step yet output while Incremental method operation operates as much as the target distance.
(b) Process of emergency stop and external input upper/lower limits
• If emergency stop instruction or external input upper/lower limits are input during positioning
control, it stops positioning control and turns ‘No output’, generating an error.
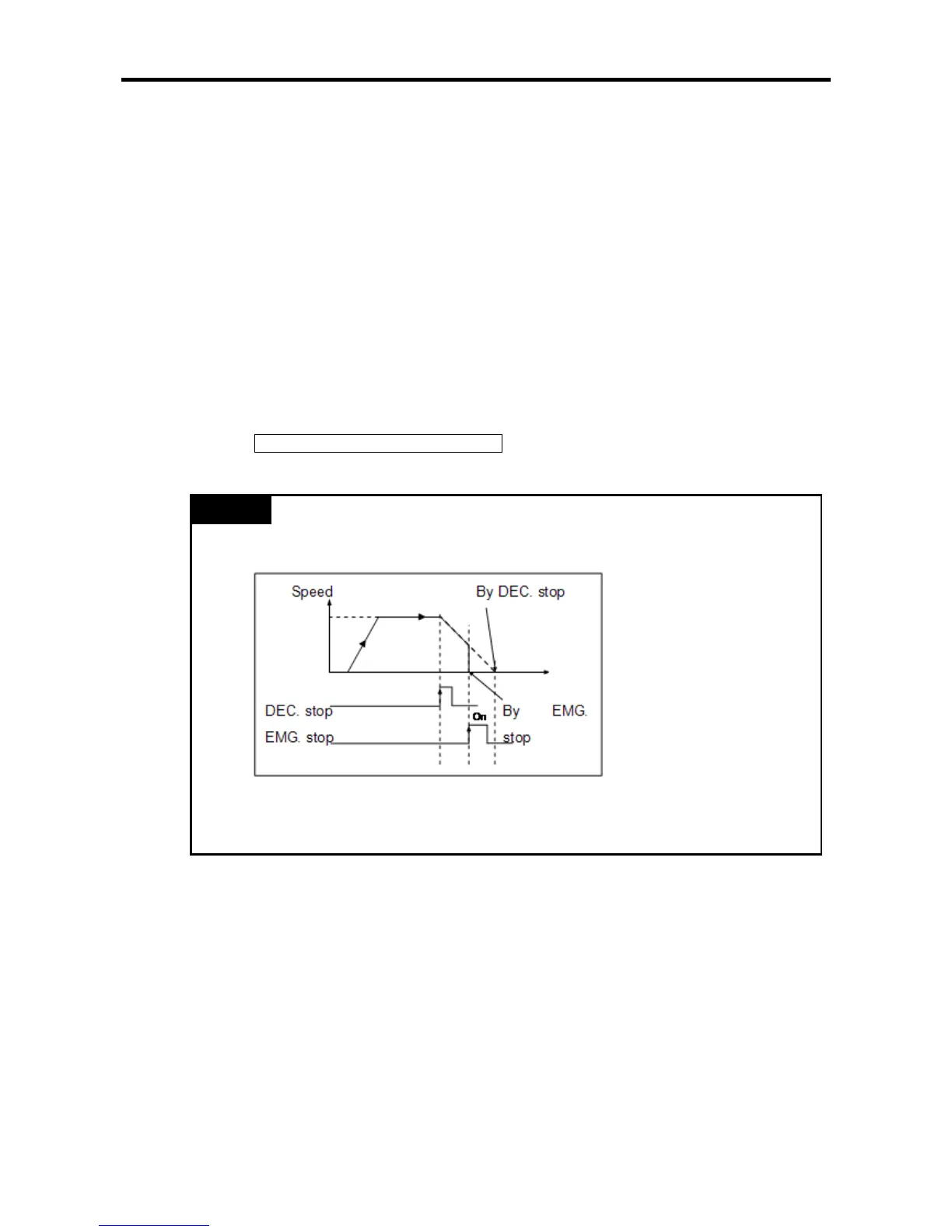
(c) Stop process priority
The priority of positioning module stop process is as follows.
Decelerating stop < Immediate stop
Remark
• In case of any immediate stop factor during decelerating stop, it processes as follow.
• Immediate stop factors: ①internal emergency stop, ②external input upper/lower limit, ③
Soft upper/lower limits
(d) Interpolation stop
• It decelerates and stops if it meets a stop instruction during interpolation operation.
• If indirect start instruction is executed in the current step when re-starting after decelerating stop,
it resumes operating the positioning operation data to the target position. At the moment, it
operates differently depending on absolute coordinate and Incremental coordinate.
(e) Emergency stop
• It immediately stops if meeting emergency stop while performing start-related instructions
(indirect start, direct start, concurrent start, synchronic start, linear interpolation start, Home
Return start, jog start and inching start).
• Internal emergency stop generates Error 481.
• Since it is subject to no output and un-defined origin once emergency stop is executed, it may run