17. Interface specifications
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 248
By default, the feature is set to True meaning that:
•
Neither the TOP48V pin nor the TOP-Safe48V pin can draw power during an
Emergency or Protective stop.
•
The power from both pins are softstarted by gradually raising the voltage from
0 to 48V in 100ms. During this period, the current should be less than 2A.
If you set the feature to False, the TOP FUSE does not turn off when the robot
enters Protective or Emergency stop. This means that:
•
The TOP 48V pin can still draw power from the robot during an Emergency or
Protective stop.
•
The TOP-Safe 48V pin cannot draw power until the robot exits the stopped
state, but the inrush current is not reduced by the softstarter. If the inrush
current is too high, the fuse will trip and start again with the inbuilt softstarter.
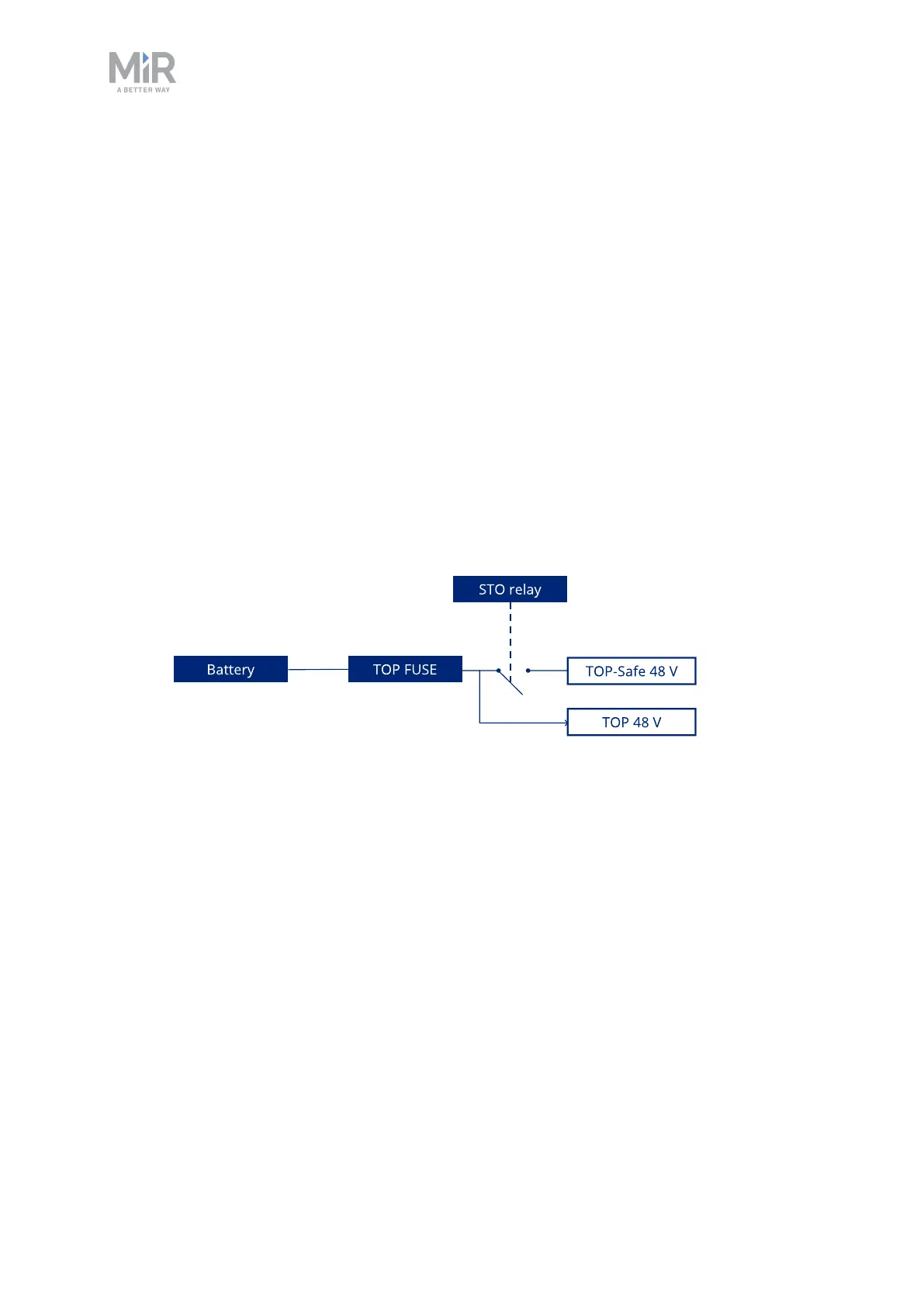
Figure 17.2. Diagram of how the TOPFUSE and STOcontactors control the power connection to
the Power top interface.