12.2 b: APPLICATION
562 SIEPYEUOQ2A01G AC Drive Q2A Technical Manual
Use Table 12.11 to select how the feedback signal is input to the drive for PID control.
Table 12.11 PID Feedback Input Method
PID Feedback Input Method Setting
Multi-function analog input terminal AI1 Set H3-02 = F [PID Fbk].
Multi-function analog input terminal AI2 Set H3-10 = F.
Multi-function analog input terminal AI3 Set H3-06 = F.
Pulse train input terminal DI Set H6-01 = 2 [PID SP Value].
• The drive uses two feedback signals, and the difference between those signals becomes the deviation.
Use Table 12.12 to select how the second feedback signal is input to the drive. The drive calculates the
deviation of the second feedback value. Set H3-02, H3-06, or H3-10 = 11 [AI1 Function Selection, AI3
Function Selection, or AI2 Function Selection = Diff PIDFbk] to enable the second feedback signal used to
calculated the deviation.
Table 12.12 PID Differential Feedback Input Method
PID Differential Feedback Input Method Setting
Multi-function analog input terminal AI1 Set H3-02 = 11 [Diff PIDFbk].
Multi-function analog input terminal AI2 Set H3-10 = 11.
Multi-function analog input terminal AI3 Set H3-06 = 11.
Note:
If you set more than one of H3-02, H3-06, and H3-10 to 11, it will trigger oPE07 [Analog Input Selection Error].
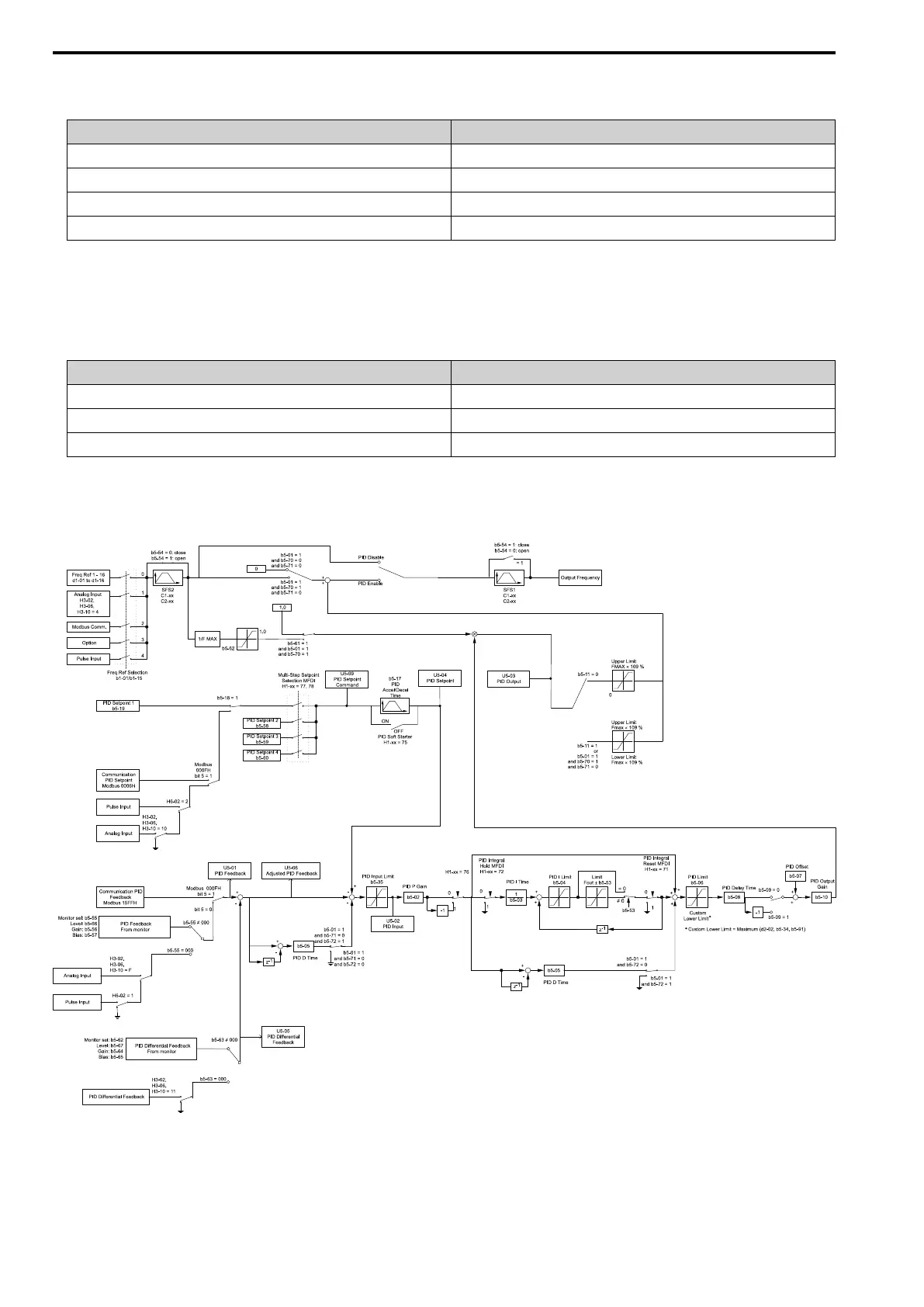
■ PID Control Block Diagram
Figure 12.29 PID Control Block Diagram