Chapter 4 Operating instructions
S3000
42 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8009942/WK81/2012-11-28
Subject to change without notice
Configurable functions
4.4.2 Tolerances allowed on the dynamic inputs
As a rule the same pulse frequency is present at the dynamic inputs when a vehicle moves
in a straight line. On driving around bends or in case of wear e.g. of the vehicle’s tires, the
values at the two inputs may, however, vary.
The velocities from the two incremental encoders may only differ from each other by a
tolerance that can be configured. Deviations are allowed only for a certain time window
(see fig. below) depending on the velocity.
The maximum percentage deviation between the two encoder velocities that can be
configured is 45%. During this process the higher of the two velocities (irrespective of
whether with positive or negative sign) is used as the reference for this calculation as well
as the vehicle velocity.
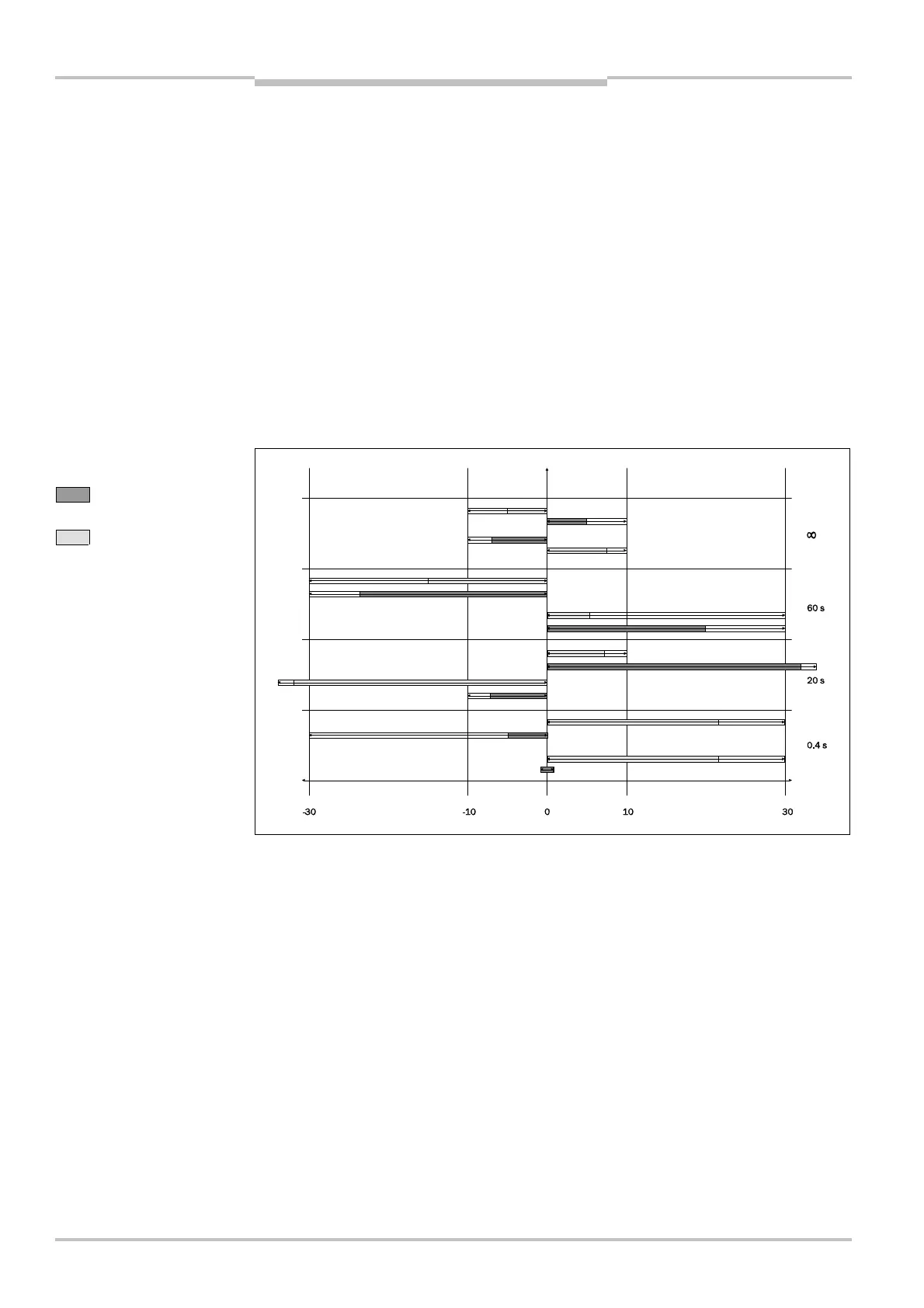
Exceeding the tolerance is tolerated for a certain period of time. Then the system switches
to a safe state (lock-out). The period of time is dependent on the vehicle velocity. Fig. 17
shows the deviations that are tolerated and for how long.
If the vehicle velocity is in the range between –10 cm/s and +10 cm/s, then there is no
shut down, irrespective of how long the deviation between the incremental encoders is
present.
If the vehicle velocity is between –30 and –10 cm/s or +10 and +30 cm/s, then the
maximum period of time for which a deviation is tolerated is 60 s.
If the vehicle velocity is in the range Z–30 cm/s or J+30 cm/s, then the maximum
period of time for which a deviation is tolerated is 20 s.
If the vehicle velocity is in the range Z–10 cm/s or J+10 cm/s, then different directions
of rotation on the incremental encoders are only tolerated for 0.4 s.
You can disable the tolerance ranges by switching to a monitoring case in which a limit
velocity is monitored (see section 4.10.2 “Monitoring case switching via velocity
information” on page 60).
on the dynamic inputs
Velocity on input C
Velocity on input D
Note