RUGGEDCOM ROS
User Guide
Chapter 4
System Administration
Configuring an Alarm 109
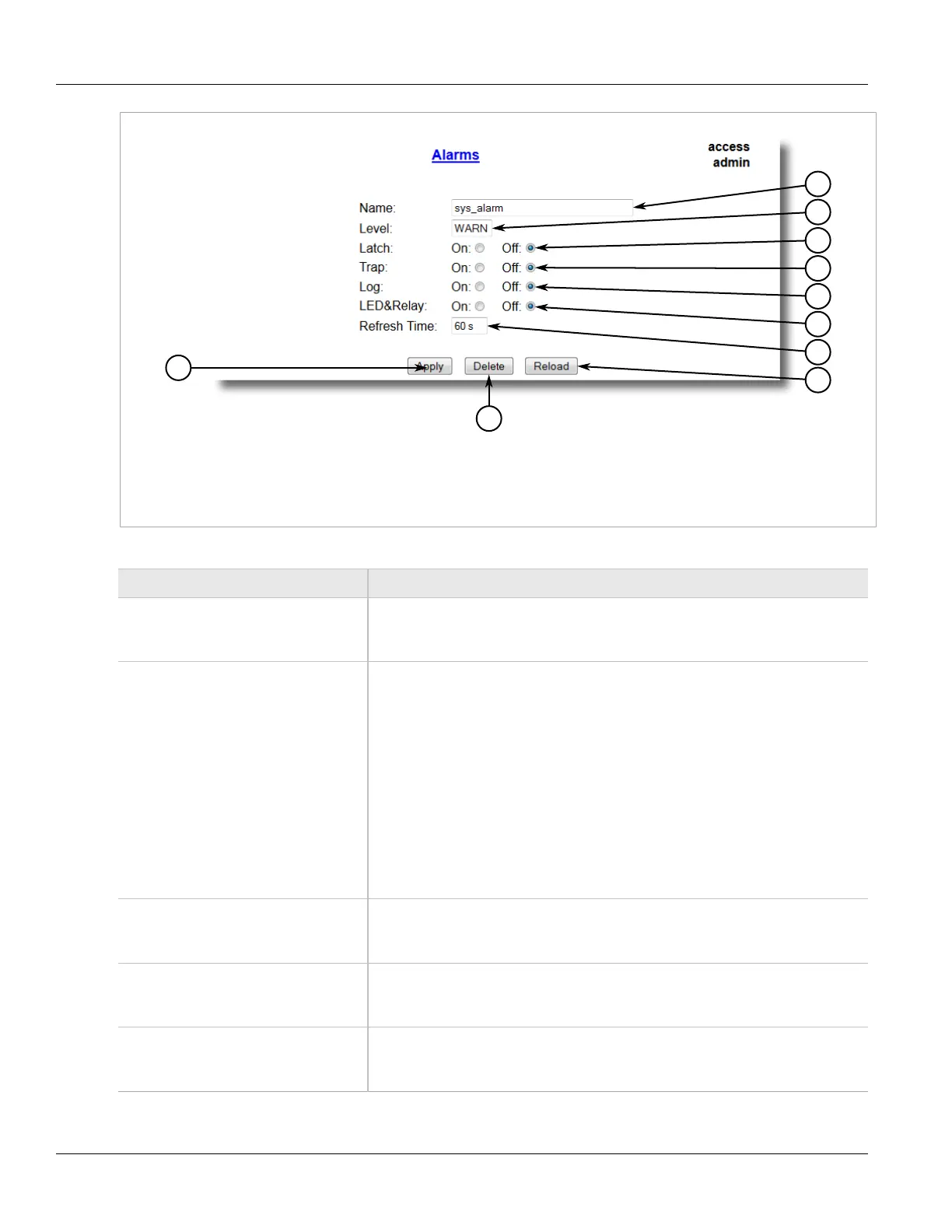
Figure 70: Alarms Form
1. Name Box 2. Level Box 3. Latch Box 4. Trap Box 5. Log Box 6. LED & Relay Box 7. Refresh Time Box 8. Apply
Button 9. Delete Button 10. Reload Button
3. Configure the following parameter(s) as required:
Parameter Description
Name Synopsis: Any 34 characters
Default: sys_alarm
The alarm name, as obtained through the alarms CLI command.
Level Synopsis: { EMRG, ALRT, CRIT, ERRO, WARN, NOTE, INFO, DEBG }
Severity level of the alarm:
• EMERG - The device has had a serious failure that caused a system reboot.
• ALERT - The device has had a serious failure that did not cause a system reboot.
• CRITICAL - The device has a serious unrecoverable problem.
• ERROR - The device has a recoverable problem that does not seriously affect
operation.
• WARNING - Possibly serious problem affecting overall system operation.
• NOTIFY - Condition detected that is not expected or not allowed.
• INFO - Event which is a part of normal operation, e.g. cold start, user login etc.
• DEBUG - Intended for factory troubleshooting only.
This parameter is not configurable.
Latch Synopsis: { On, Off }
Default: Off
Enables latching occurrence of this alarm in the Alarms Table.
Trap Synopsis: { On, Off }
Default: Off
Enables sending an SNMP trap for this alarm.
Log Synopsis: { On, Off }
Default: Off
Enables logging the occurrence of this alarm in syslog.txt.
 Loading...
Loading...



