Chapter 5
Setup and Configuration
RUGGEDCOM ROS
User Guide
170 Configuring Priority to CoS Mapping
4. Click Apply.
Section 5.4.3
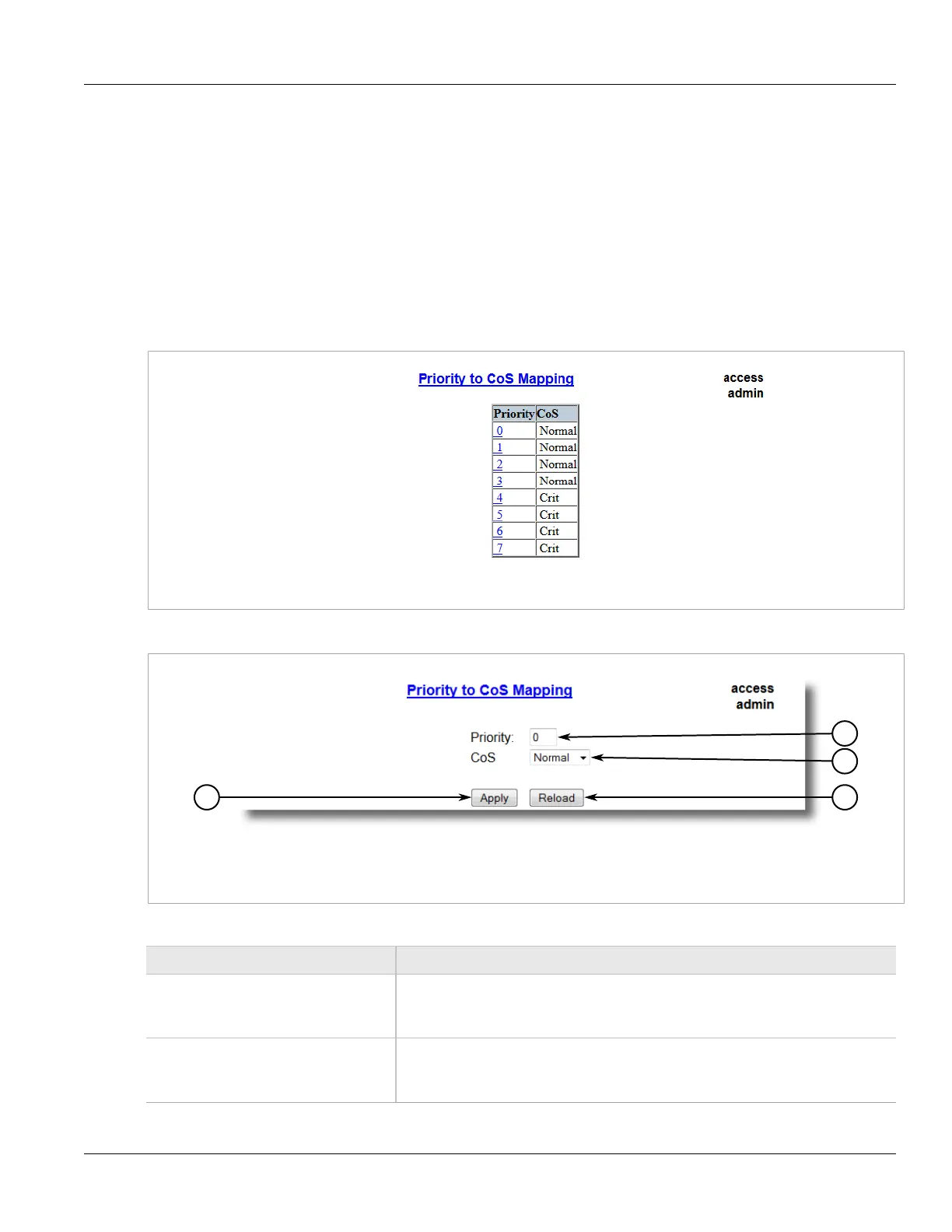
Configuring Priority to CoS Mapping
Frames received untagged can be automatically assigned a CoS based on their priority level.
To map a priority level to a CoS, do the following:
1. Navigate to Classes of Service » Configure Priority to CoS Mapping. The Priority to CoS Mapping table
appears.
Figure 111: Priority to CoS Mapping Table
2. Select a priority level. The Priority to CoS Mapping form appears.
Figure 112: Priority to CoS Mapping Form
1. Priority Box 2. CoS List 3. Apply Button 4. Reload Button
3. Configure the following parameter(s) as required:
Parameter Description
Priority Synopsis: 0 to 7
Default: 0
Value of the IEEE 802.1p priority.
CoS Synopsis: { Normal, Medium, High, Crit }
Default: Normal
CoS assigned to received tagged frames with the specified IEEE 802.1p priority value.