Chapter 5
Setup and Configuration
RUGGEDCOM ROS
User Guide
168 Configuring Classes of Service Globally
• Section 5.4.4, “Configuring DSCP to CoS Mapping”
Section 5.4.1
Configuring Classes of Service Globally
To configure global settings for Classes of Service (CoS), do the following:
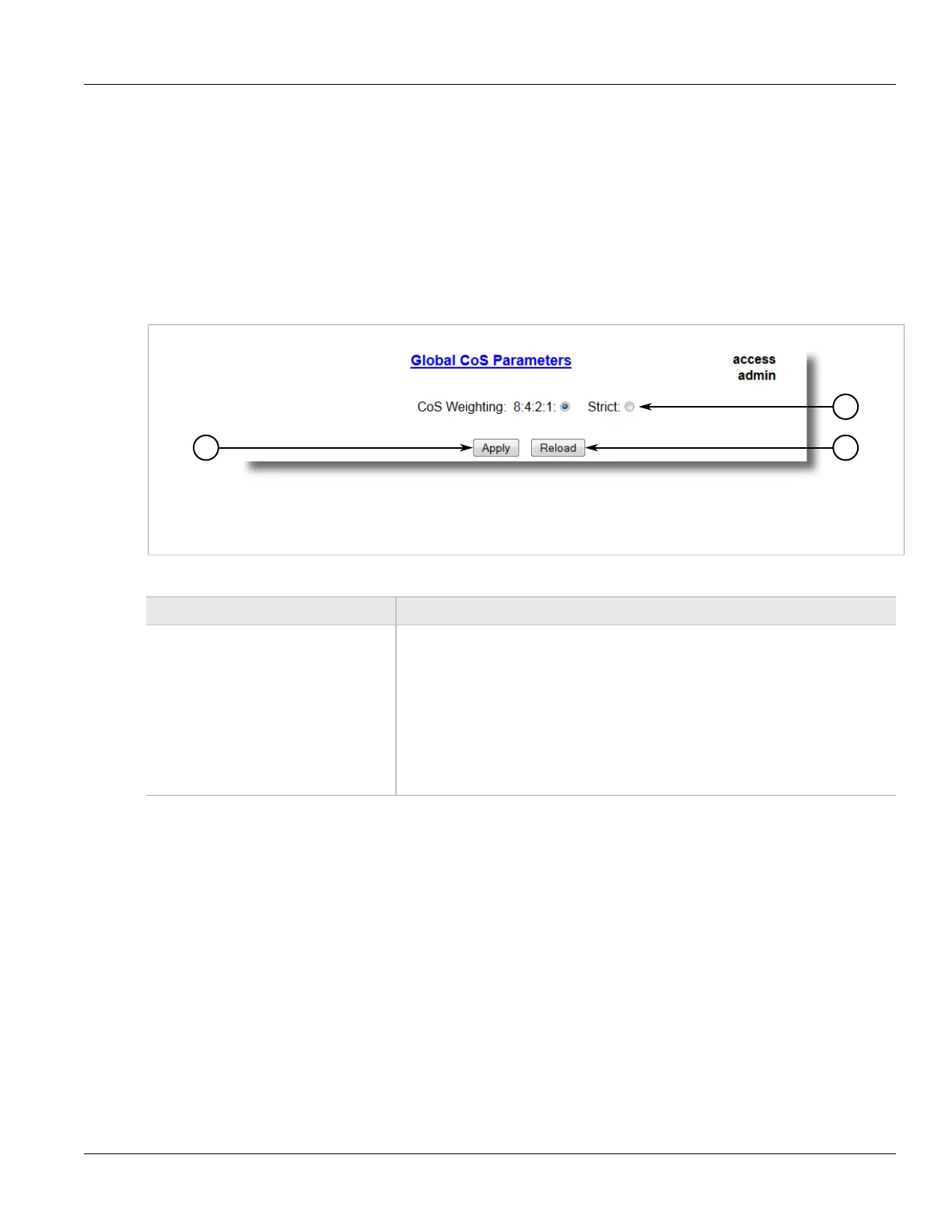
1. Navigate to Classes of Service » Configure Global CoS Parameters. The Global CoS Parameters form
appears.
Figure 108: Global CoS Parameters Form
1. CoS Weighting Options 2. Apply Button 3. Reload Button
2. Configure the following parameter(s) as required:
Parameter Description
CoS Weighting Synopsis: { 8:4:2:1, Strict }
Default: 8:4:2:1
During traffic bursts, frames queued in the switch pending transmission on a port
may have different CoS priorities. This parameter specifies weighting algorithm for
transmitting different priority CoS frames.
Examples:
• 8:4:2:1 - 8 Critical, 4 High, 2 Medium and 1 Normal priority CoS frame
• Strict - lower priority CoS frames will be only transmitted after all higher priority CoS
frames have been transmitted
3. Click Apply.
4. If necessary, configure CoS mapping based on either the IEEE 802.1p priority or Differentiated Services (DS)
field set in the IP header for each packet. For more information, refer to Section 5.4.3, “Configuring Priority to
CoS Mapping” or Section 5.4.4, “Configuring DSCP to CoS Mapping”.
Section 5.4.2
Configuring Classes of Service for Specific Ethernet Ports
To configure Classes of Service (CoS) for one or more Ethernet ports, do the following:
1. Navigate to Classes of Service » Configure Port CoS Parameters. The Port CoS Parameters table
appears.