Chapter 5
Setup and Configuration
RUGGEDCOM ROS
User Guide
164 Configuring an MSTI for an Ethernet Port
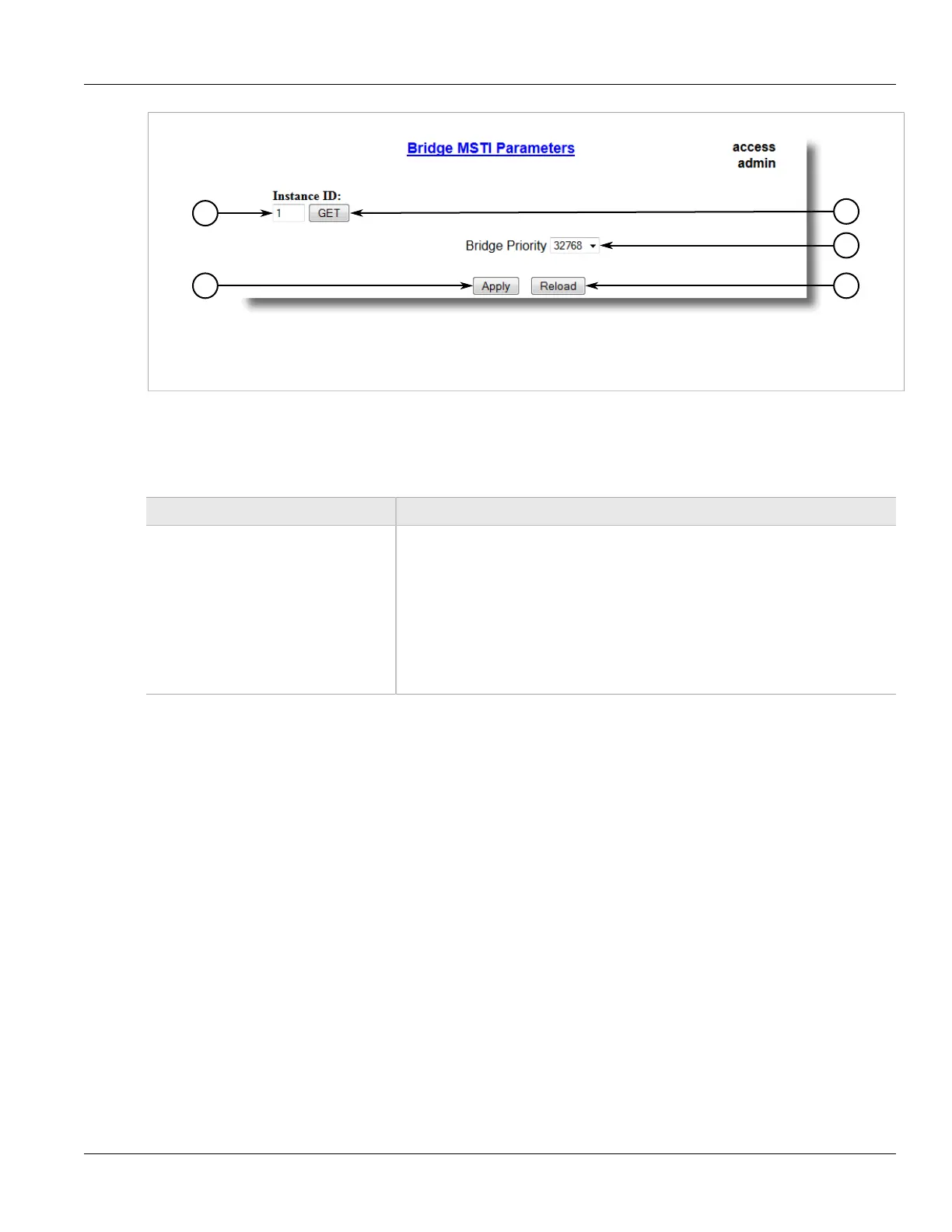
Figure 104: Bridge MSTI Parameters Form
1. Instance ID Box 2. Get Button 3. Bridge Priority List 4. Apply Button 5. Reload Button
2. Under Instance ID, type an ID number for a Multiple Spanning Tree Instance (MSTI) and click GET. The
settings for the MSTI are displayed. Any changes made to the configuration will be applied specifically to this
instance ID.
3. Configure the following parameter(s) as required:
Parameter Description
Bridge Priority Synopsis: { 0, 4096, 8192, 12288, 16384, 20480, 24576, 28672, 32768, 36864,
40960, 45056, 49152, 53248, 57344, 61440 }
Default: 32768
Bridge Priority provides a way to control the topology of the STP connected network.
The desired Root and Designated bridges can be configured for a particular topology.
The bridge with the lowest priority will become root. In the event of a failure of the root
bridge, the bridge with the next lowest priority will then become root. Designated bridges
that (for redundancy purposes) service a common LAN also use priority to determine
which bridge is active. In this way careful selection of Bridge Priorities can establish the
path of traffic flows in normal and abnormal conditions.
4. Click Apply.
Section 5.3.9.5
Configuring an MSTI for an Ethernet Port
To configure a Multiple Spanning Tree Instance (MSTI) for an Ethernet port, do the following
1. Navigate to Spanning Tree » Configure Port MSTI Parameters. The Port MSTI Parameters table
appears.