Chapter 3
Device Management
RUGGEDCOM ROS
User Guide
72 Detecting Cable Faults
Parameter Description
The time that the link has to continuously stay up before the "link up" decision is made
by the device.
(The device performs de-bouncing of Ethernet link detection to avoid multiple responses
to an occasional link bouncing event, e.g. when a cable is shaking while being plugged-
in or unplugged).
3. Click Apply.
Section 3.6.11
Detecting Cable Faults
Connectivity issues can sometimes be attributed to faults in Ethernet cables. To help detect cable faults, short
circuits, open cables or cables that are too long, ROS includes a built-in cable diagnostics utility.
The following sections describe how to run diagnostics on Ethernet cables:
• Section 3.6.11.1, “Viewing Cable Diagnostics Results”
• Section 3.6.11.2, “Performing Cable Diagnostics”
• Section 3.6.11.3, “Clearing Cable Diagnostics”
• Section 3.6.11.4, “Determining the Estimated Distance To Fault (DTF)”
Section 3.6.11.1
Viewing Cable Diagnostics Results
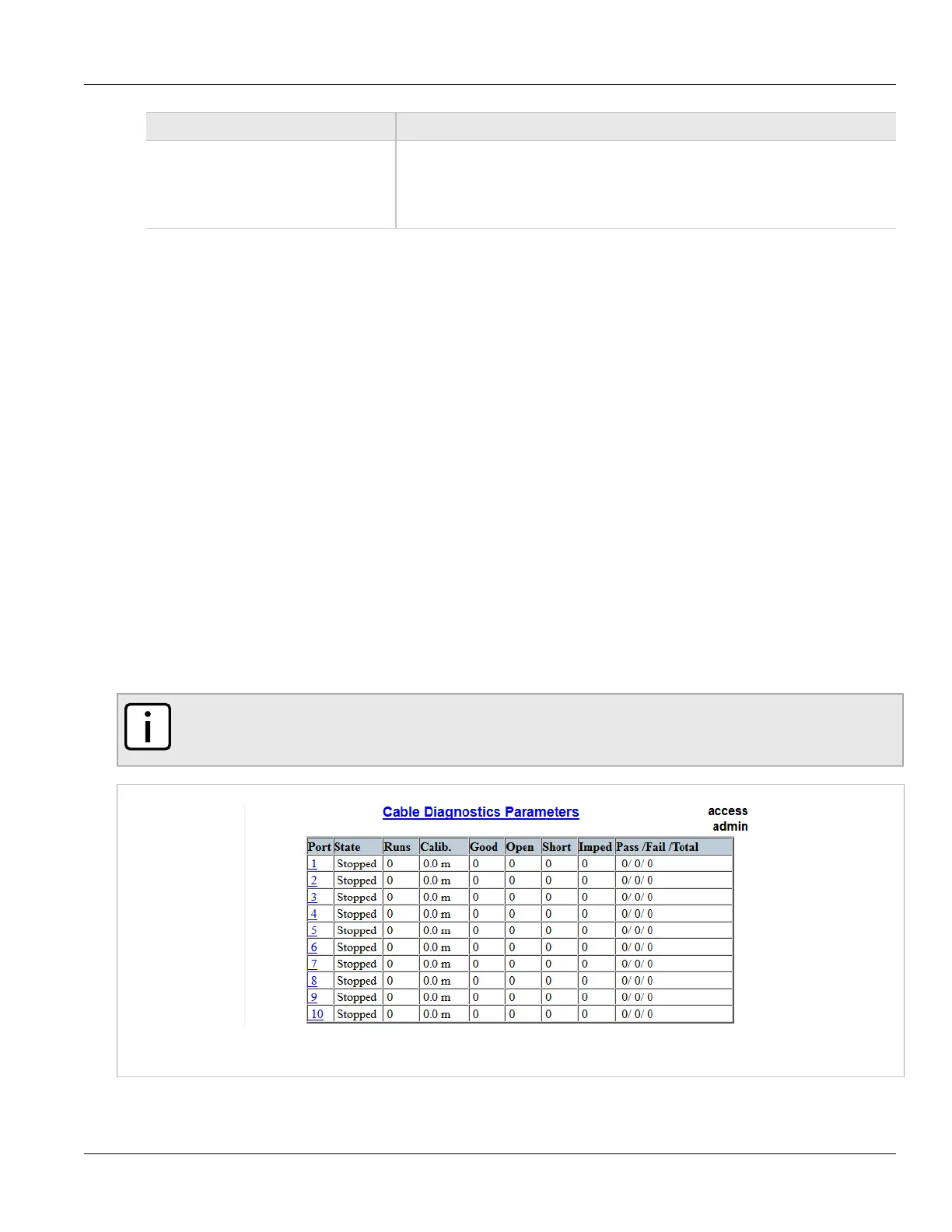
To view the results of previous diagnostic tests, navigate to Ethernet Ports » Configure/View Cable
Diagnostics Parameters. The Cable Diagnostics Parameters table appears.
NOTE
For information about how to start a diagnostic test, refer to Section 3.6.11.2, “Performing Cable
Diagnostics”.
Figure 31: Cable Diagnostics Parameters Table
This table displays the following information: