Chapter 5
Setup and Configuration
RUGGEDCOM ROS
User Guide
196 Configuring LLDP Globally
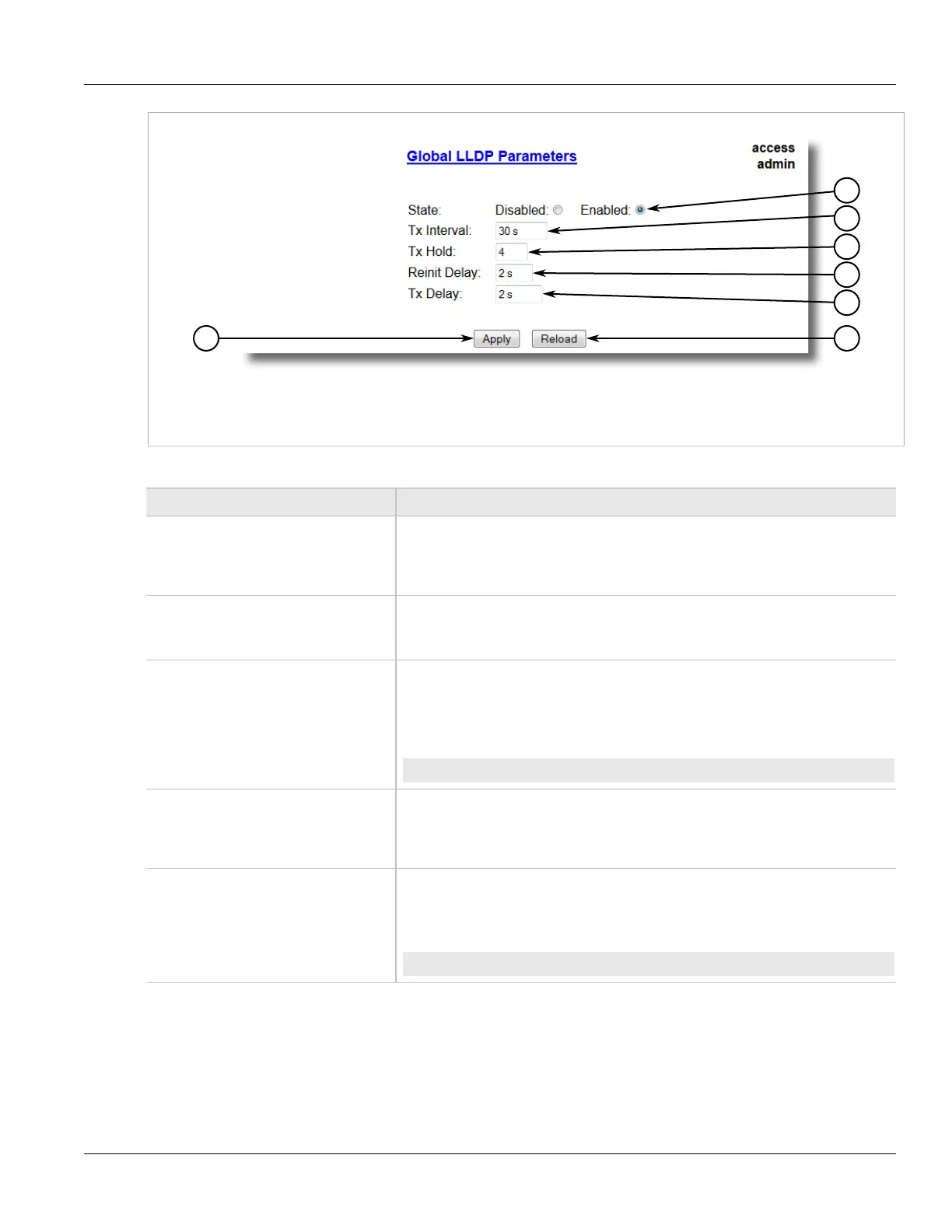
Figure 143: Global LLDP Parameters Form
1. State Options 2. Tx Interval Box 3. Tx Hold Box 4. Reinit Delay Box 5. Tx Delay Box 6. Apply Button 7. Reload Button
2. Configure the following parameter(s) as required:
Parameter Description
State Synopsis: { Disabled, Enabled }
Default: Enabled
Enables LLDP protocol. Note that LLDP is enabled on a port when LLDP is enabled
globally and along with enabling per port setting in Port LLDP Parameters menu.
Tx Interval Synopsis: 5 to 32768 s
Default: 30 s
The interval at which LLDP frames are transmitted on behalf of this LLDP agent.
Tx Hold Synopsis: 2 to 10
Default: 4
The multiplier of the Tx Interval parameter that determines the actual time-to-live (TTL)
value used in a LLDPDU. The actual TTL value can be expressed by the following
formula:
TTL = MIN(65535, (Tx Interval * Tx Hold))
Reinit Delay Synopsis: 1 to 10 s
Default: 2 s
The delay in seconds from when the value of Admin Status parameter of a particular
port becomes 'Disbled' until re-initialization will be lattempted.
Tx Delay Synopsis: 1 to 8192 s
Default: 2 s
The delay in seconds between successive LLDP frame transmissions initiated by value
or status changed. The recommended value is set by the following formula:
1 <= txDelay <= (0.25 * Tx Interval)
3. Click Apply.