RUGGEDCOM ROS
User Guide
Chapter 2
Using ROS
Available CLI Commands 33
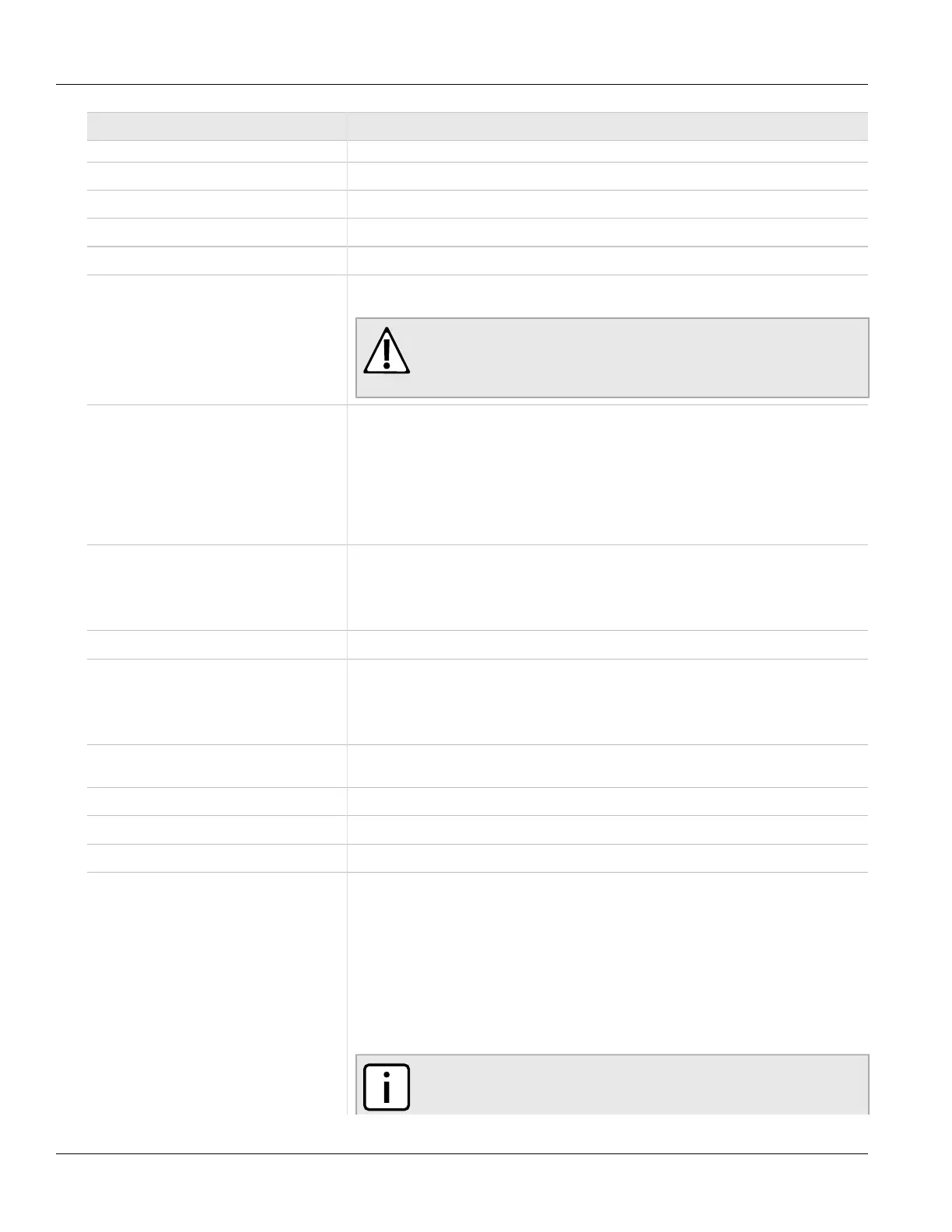
Command Description
• port is a comma separated list of port numbers (e.g. 1,3-5,7)
clrstpstats Clears all spanning tree statistics.
cls Clears the screen.
dir Prints the directory listing.
exit Terminates the session.
factory Enables factory mode, which includes several factory-level commands used for testing and
troubleshooting. Only available to admin users.
CAUTION!
Misuse of the factory commands may corrupt the operational state of device
and/or may permanently damage the ability to recover the device without
manufacturer intervention.
flashfiles {info filename |
defrag}
A set of diagnostic commands to display information about the Flash filesystem and to
defragment Flash memory.
Optional and/or required parameters include:
• info filename displays information about the specified file in the Flash file system
• defrag defragments files in the Flash file system
For more information about the flashfiles command, refer to Section 2.8, “Managing the
Flash File System”.
flashleds timeout
Flashes the LED indicators on the device for a specified number of seconds.
Optional and/or required parameters include:
• timeout is the number of seconds to flash the LED indicators. To stop the LEDs from
flashing, set the timeout period to 0 (zero).
fpgacmd
Provides access to the FPGA management tool for troubleshooting time synchronization.
help command
Displays a brief description of the specified command. If no command is specified, it
displays a list of all available commands, including a description for each.
Optional and/or required parameters include:
• command is the command
ipconfig Displays the current IP address, subnet mask and default gateway. This command provides
the only way of determining these values when DHCP is used.
loaddflts Loads the factory default configuration.
login Logs in to the shell.
logout Logs out of the shell.
ping address {count | timeout}
Sends an ICMP echo request to a remotely connected device. For each reply received, the
round trip time is displayed. Use this command to verify connectivity to the next connected
device. It is a useful tool for testing commissioned links. This command also includes
the ability to send a specific number of pings with a specified time for which to wait for a
response.
Optional and/or required parameters include:
• address is the target IP address.
• count is the number of echo requests to send. The default is 4.
• timeout is the time in milliseconds to wait for each reply. The range is 2 to 5000
seconds. The default is 300 milliseconds.
NOTE
The device to be pinged must support ICMP echo. Upon commencing the ping,
an ARP request for the MAC address of the device is issued. If the device to be