Using USS Protocol Instructions to Communicate with Drives
11-10
S7-200 Programmable Controller System Manual
A5E00066097-02
Table 11-3 Operands and Data Types for the DRV_CTRL Subroutine
Inputs/Outputs Data TypesOperands
INHIBIT I, Q, M, S, SM, T, C, V, L BOOL
FAULT I, Q, M, S, SM, T, C, V, L BOOL
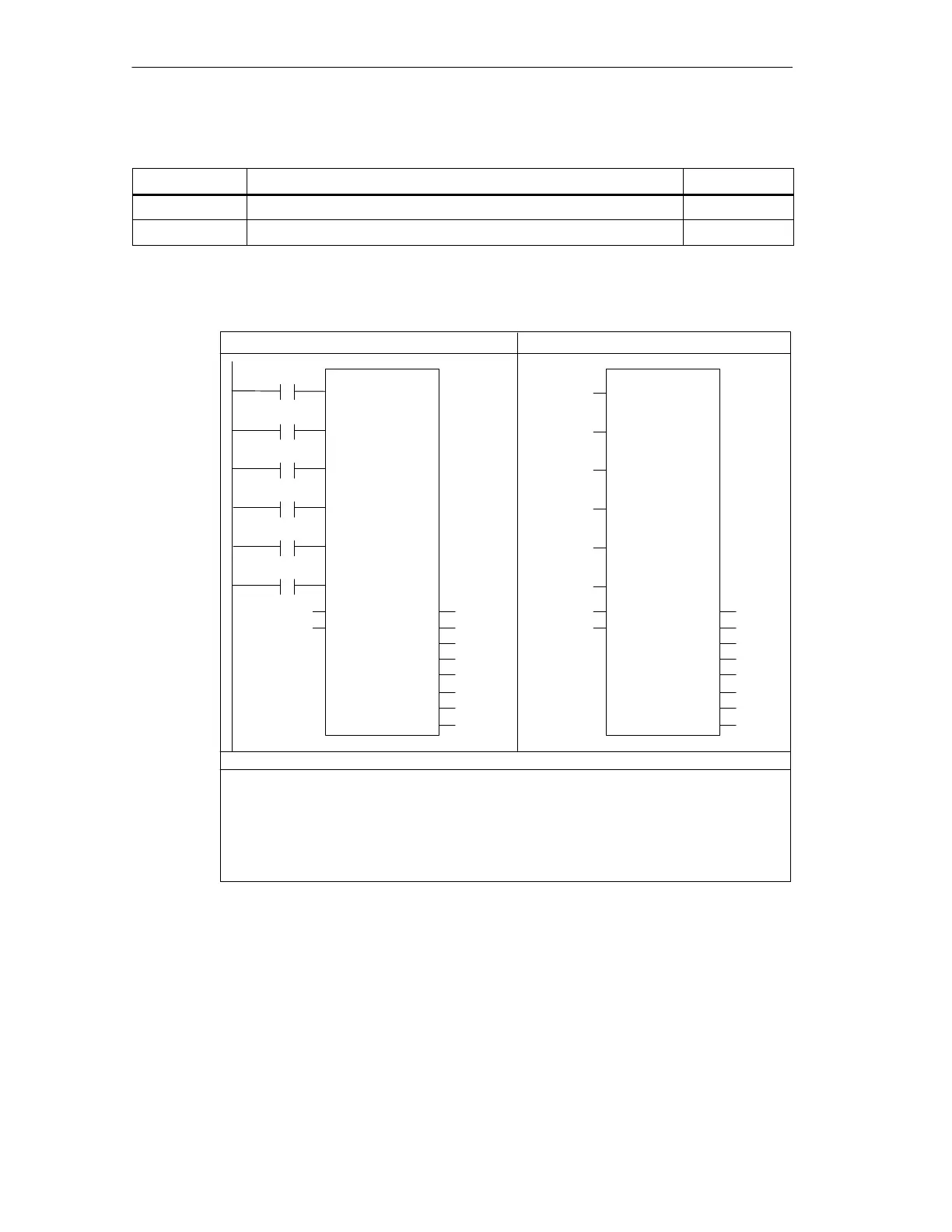
Figure 11-5 shows how the DRV_CTRL subroutine should be used in LAD, FBD,
and STL.
SM0.0
I0.0
I0.1
I0.2
I0.3
I0.4
SM0.0
I0.0
I0.1
I0.2
I0.3
I0.4
EN
RSP_R
ERR
VW4
Q0.0
Q0.1
Q0.2
Q0.3
STATUS
SPEED
RUN_EN
DIR_CW
INHIBIT
FAULT
M0.0
VB2
VD6
DRV_CTRL
RUN
OFF2
OFF3
F_ACK
DIR
DRIVE
SPD_SP
0
100.0
EN
RSP_R
ERR
VW4
Q0.0
Q0.1
Q0.2
Q0.3
STATUS
SPEED
RUN_EN
DIR_CW
INHIBIT
FAULT
M0.0
VB2
VD6
DRV_CTRL
RUN
OFF2
OFF3
F_ACK
DIR
DRIVE
SPD_SP
0
100.0
LAD
FBD
STL
NETWORK 2 //Control box for drive 0
//
LD SM0.0
CALL DRV_CTRL, I0.0, I0.1, I0.2, I0.3,
I0.4, 0, 100.0, M0.0, VB2, VW4, VD6, Q0.0,
Q0.1, Q0.2, Q0.3
Figure 11-5 Using the DRV_CTRL Subroutine in LAD, FBD, and STL

 Loading...
Loading...










