5.4 Supplementary Information on Trial Operation
5-7
5
5.4.2 Servomotors with Brakes
Use servomotors with brakes for vertical shaft applications or when external force is applied
to the shaft to prevent the shaft from rotating due to gravity or external force when power is
lost.
The SERVOPACK uses the brake interlock output (/BK) signal to control holding brake
operation when using servomotors with brakes.
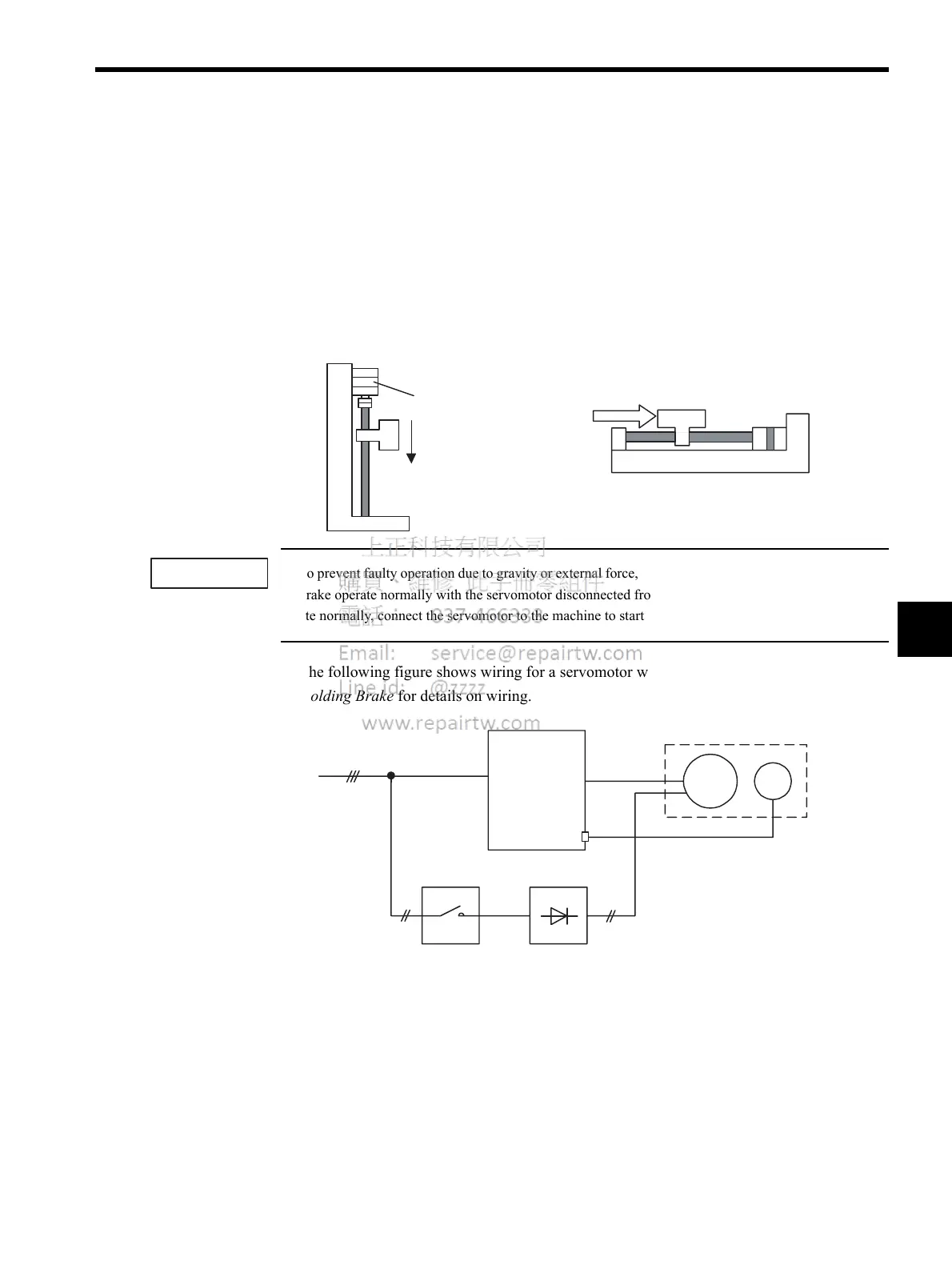
To prevent faulty operation due to gravity or external force, make sure that the servomotor and holding
brake operate normally with the servomotor disconnected from the machine. When both of them oper-
ate normally, connect the servomotor to the machine to start trial operation.
The following figure shows wiring for a servomotor with brakes. Refer to 6.5.2 Using the
Holding Brake for details on wiring.
Servomotor
Holding brake
Prevents the
servomotor from
rotating due to gravity .
Servomotor
External
force
z Vertical Shaft
z Shaft with External Force Applied
IMPORTANT
Power supply
Three-phase 200 V
L1 , L2 , L3
SGDH
SERVOPACK
Servomotor with brakes
U, V, W
M
PG
Encoder
CN2
Magnetic Contactor
Single-phase
200 V
Brake control relay
Brake power supply
LPDE-1H01 (100-V input)
LPSE-2H01 (200-V input)
(90VDC)

 Loading...
Loading...


