4.3 Main Commands
4-41
4
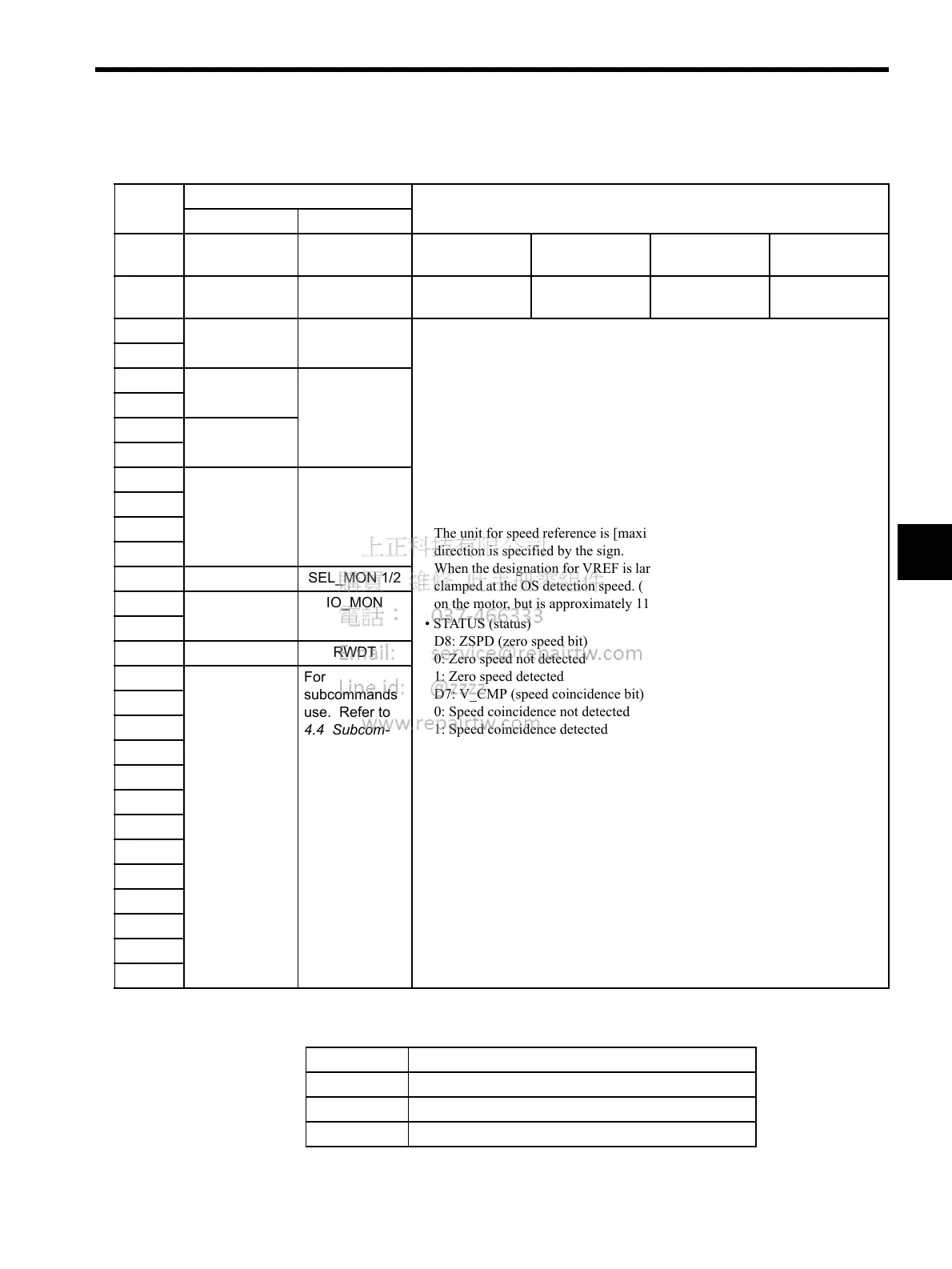
4.3.30 Velocity Control (VELCTRL: 3CH)
Related Parameters
Byte VECTRL Description
Command Response
1 3CH 3CH Processing
classifications
Motion command
group
Synchronization
classifications
Asynchronous
2 ALARM Processing time Within communi-
cations cycle
Subcommand Can be used.
3OPTIONSTATUS• Controls speed. (The Servo does not perform position control, but directly
controls the speed of the speed loop.)
Soft-start acceleration/deceleration can also be used by setting the parameters.
• Can be used during phases 2 and 3.
• A warning will occur and the command will be ignored in the following cases.
- During phase 1: MECHATROLINK-II command warning (A.95)
- If the SERVOAPCK is Servo OFF: MECHATROLINK-II command warn-
ing (A.95)
• OPTION can be selected. Refer to 4.5.2 Option Field Specifications: OPTION
for details.
• VREF (speed reference)
The unit for speed reference is [maximum motor speed/40000000H]. The
direction is specified by the sign.
When the designation for VREF is larger than the maximum motor speed, it is
clamped at the OS detection speed. (The OS detection speed varies depending
on the motor, but is approximately 110% of the maximum speed.)
• STATUS (status)
D8: ZSPD (zero speed bit)
0: Zero speed not detected
1: Zero speed detected
D7: V_CMP (speed coincidence bit)
0: Speed coincidence not detected
1: Speed coincidence detected
• Monitor (MONITOR 1, 2 ,3, 4)
The unit for TSPD, CSPD, and FSDP is [maximum motor speed/40000000H].
• Setting the torque reference option (P_TLIM (TFF), N_TLIM)
Setting range: 0 to 4000H (maximum motor torque/4000H)
Refer to
Torque Reference Option Operation on page 4-42 for operation
details.
4
5P_TLIM
(TFF)
MONITOR1
6
7N_TLIM
8
9 VREF MONITOR2
10
11
12
13 SEL_MON 1/2 SEL_MON 1/2
14 IO_MON
15
16 WDT RWDT
17 For
subcommands
use. Refer to
4.4 Subcom-
mands.
For
subcommands
use. Refer to
4.4 Subcom-
mands.
18
19
20
21
22
23
24
25
26
27
28
29
Pn No. Description
Pn305 Soft Start Acceleration Time
Pn306 Soft Start Deceleration Time
Pn002.0 Torque Reference Option in Speed/Position Control Mode

 Loading...
Loading...


