4.3 Main Commands
4-29
4
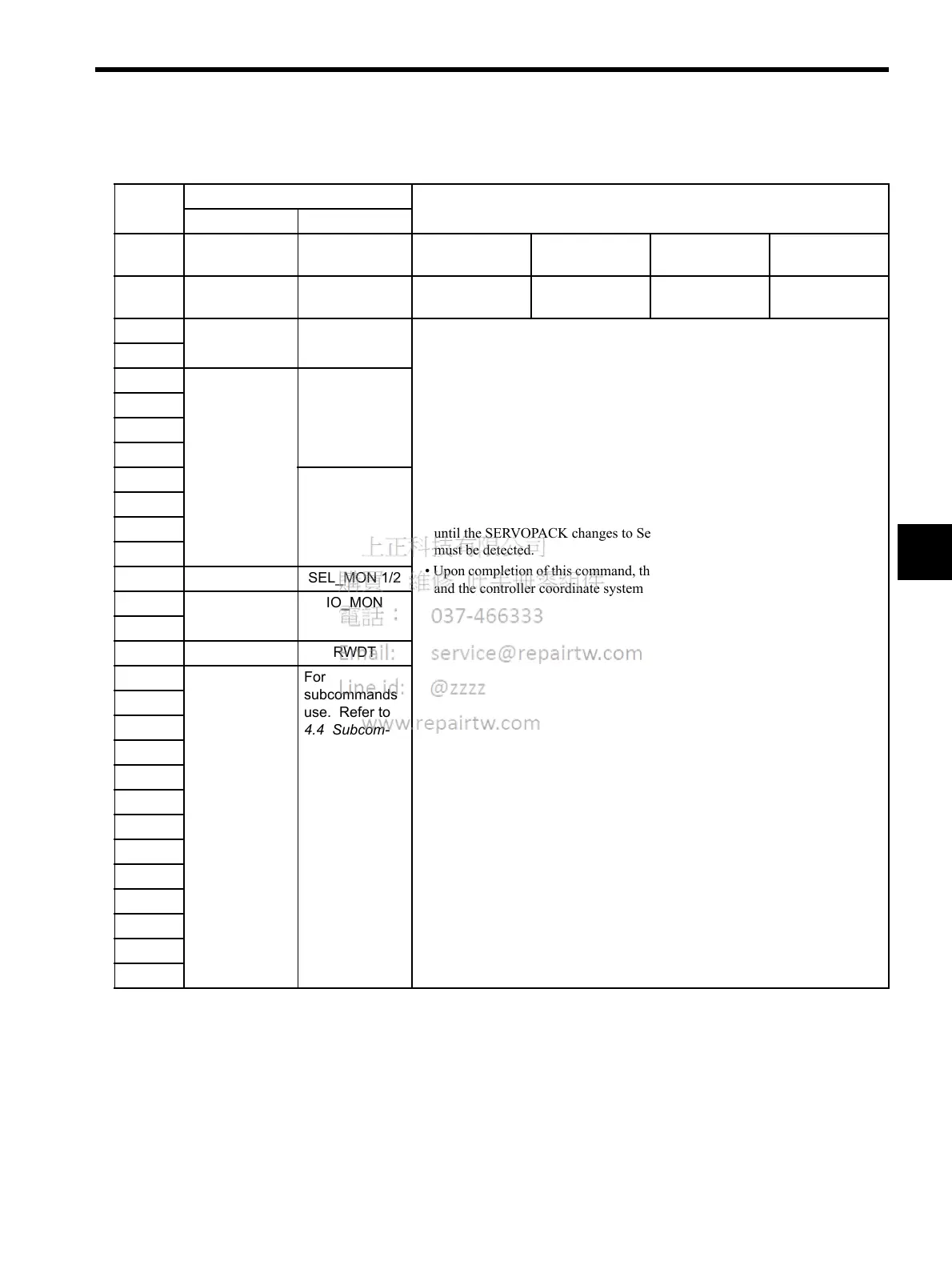
4.3.22 Servo ON (SV_ON: 31H)
Byte SV_ON Description
Command Response
1 31H 31H Processing
classifications
Control com-
mand group
Synchronization
classifications
Asynchronous
2 ALARM Processing time Within 50 ms nor-
mally
Subcommand Can be used.
3OPTIONSTATUS• The SERVOPACK changes to Servo ON.
• Can be used during phases 2 and 3.
• A MECHATROLINK-II command warning (A.95) will occur and the com-
mand will be ignored in the following cases.
- During phase 1
- During alarm occurrence (when ALM of STATUS is 1)
- If SENS_ON has not been completed when the absolute encoder is
used
• OPTION can be selected. Refer to 4.5.2 Option Field Specifications:
OPTION for details.
• For linear motors not equipped with a pole sensor, it takes 10 seconds max.
until the SERVOPACK changes to Servo ON the first time because the pole
must be detected.
• Upon completion of this command, the reference position (POS) must be read,
and the controller coordinate system must be set up.
4
5 MONITOR1
6
7
8
9 MONITOR2
10
11
12
13 SEL_MON 1/2 SEL_MON 1/2
14 IO_MON
15
16 WDT RWDT
17 For
subcommands
use. Refer to
4.4 Subcom-
mands.
For
subcommands
use. Refer to
4.4 Subcom-
mands.
18
19
20
21
22
23
24
25
26
27
28
29

 Loading...
Loading...


