4 MECHATROLINK-II Communications
4.3.25 Positioning (POSING: 35H)
4-32
4.3.25 Positioning (POSING: 35H)
Related Parameters
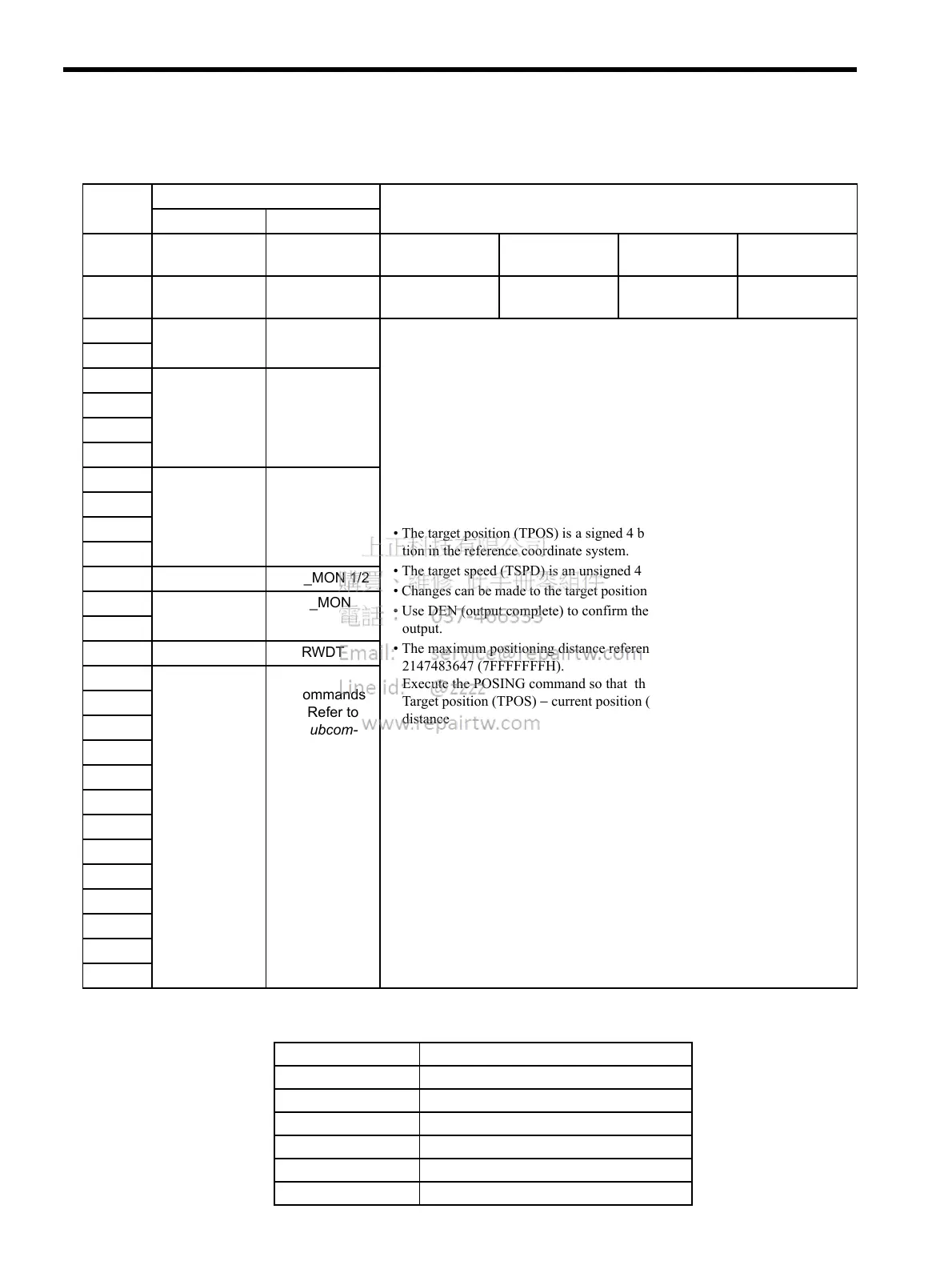
Byte POSING Description
Command Response
1 35H 35H Processing
classifications
Motion command
group
Synchronization
classifications
Synchronous
2 ALARM Processing time Within communi-
cations cycle
Subcommand Can be used.
3 OPTION STATUS • Performs positioning at the target position (TPOS) using the target speed
(TSPD).
• Can be used during phases 2 and 3.
• A warning will occur and the command will be ignored in the following cases.
- During phase 1: MECHATROLINK-II command warning (A.95)
- If the SERVOPACK is Servo OFF: MECHATROLINK-II command warning
(A.95)
- If the target speed (TSPD) exceeds the limit: Parameter setting warning
(A.94)
• OPTION can be selected. Refer to 4.5.2 Option Field Specifications: OPTION
for details.
• The target position (TPOS) is a signed 4 bytes. It is set using an absolute posi-
tion in the reference coordinate system.
• The target speed (TSPD) is an unsigned 4 bytes. It is set using units/s.
• Changes can be made to the target position and target speed during movement.
• Use DEN (output complete) to confirm the completion of position reference
output.
• The maximum positioning distance referenced by one POSING command is
2147483647 (7FFFFFFFH).
Execute the POSING command so that the following equation is satisfied:
Target position (TPOS) − current position (POS) ≤ The maximum positioning
distance
4
5 TPOS MONITOR1
6
7
8
9 TSPD MONITOR2
10
11
12
13 SEL_MON 1/2 SEL_MON 1/2
14 IO_MON
15
16 WDT RWDT
17 For
subcommands
use. Refer to
4.4 Subcom-
mands.
For
subcommands
use. Refer to
4.4 Subcom-
mands.
18
19
20
21
22
23
24
25
26
27
28
29
Pn No. Description
Pn80A First-step Linear Acceleration Parameter
Pn80B Second-step Linear Acceleration Parameter
Pn80C Acceleration Parameter Switching Speed
Pn80D First-step Linear Deceleration Parameter
Pn80E Second-step Linear Deceleration Parameter
Pn80F Deceleration Parameter Switching Speed

 Loading...
Loading...


