9.2 Troubleshooting with No Alarm Display
9-21
9
9.2 Troubleshooting with No Alarm Display
Refer to the tables below to identify the cause of a problem which causes no alarm display and
take the remedy described.
Turn OFF the servo system power supply before commencing the shaded procedures.
Contact your Yaskawa representative if the problem cannot be solved by the described proce-
dures.
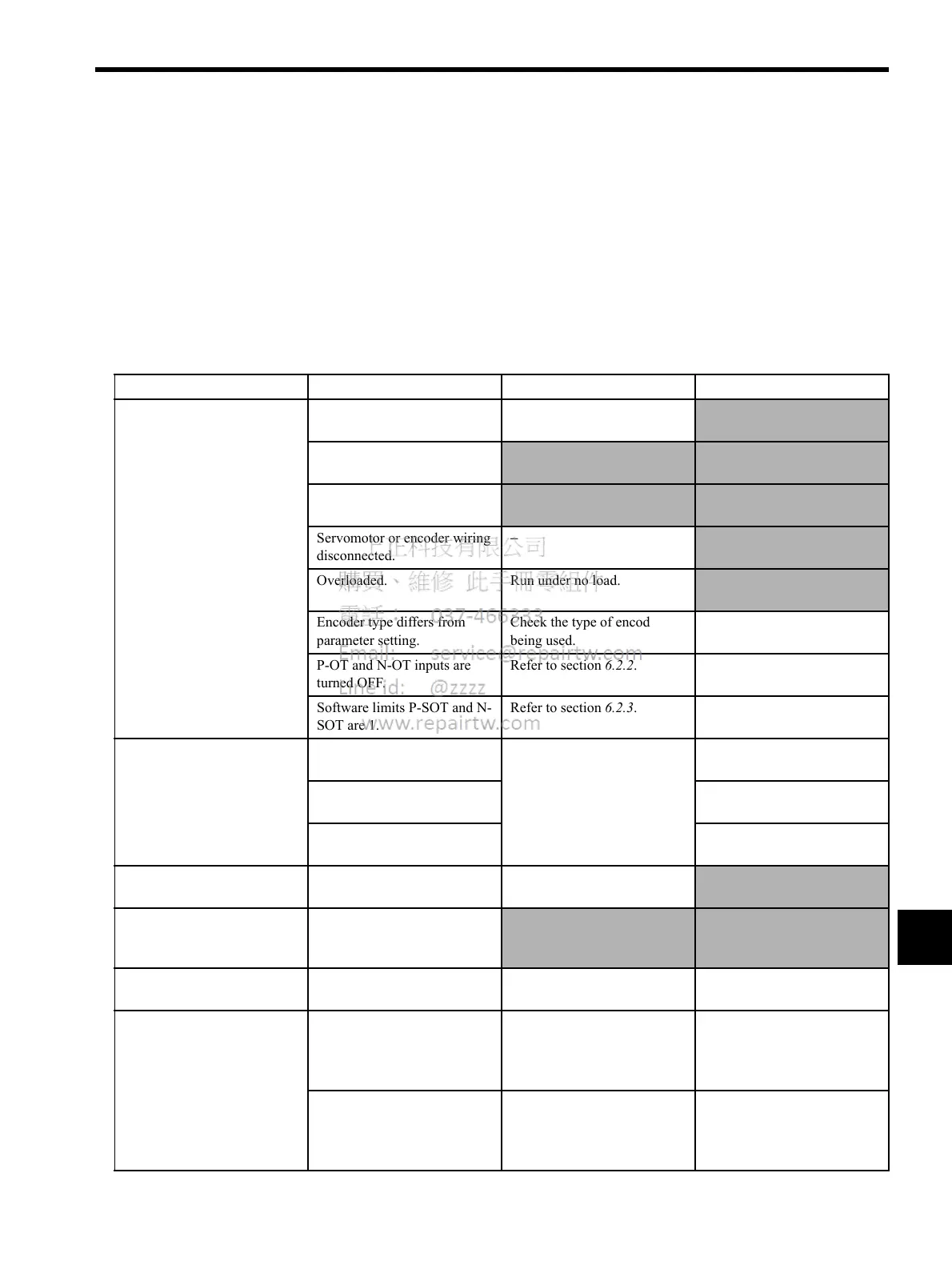
Table 9.1 Troubleshooting Table with No Alarm Display
Symptom Cause Inspection Remedy
Servomotor Does Not Start Power is not turned ON. Check voltage between power
supply terminals.
Correct the power circuit.
Loose connection. Check terminals of connectors
(CN1, CN2).
Tighten any loose parts.
Connector (CN1) external wir-
ing is incorrect.
Check connector (CN1) exter-
nal wiring
Refer to connection diagram
and correct wiring.
Servomotor or encoder wiring
disconnected.
−
Reconnect wiring.
Overloaded. Run under no load.
Reduce load or replace with
larger capacity servomotor.
Encoder type differs from
parameter setting.
Check the type of encoder
being used.
Set parameter Pn002.2 to the
encoder type being used.
P-OT and N-OT inputs are
turned OFF.
Refer to section 6.2.2. Turn P-OT and N-OT input
signals ON.
Software limits P-SOT and N-
SOT are 1.
Refer to section 6.2.3. Operate the servomotor within
the software limits.
Servomotor Does Not Run Motion commands have not
been sent.
Check using
MECHAROLINK-II
communications or the
MECHATROLINK-II monitor.
Send the motion commands.
SV_ON command has not
been sent.
Send the SV_ON command.
SENS_ON command has not
been sent.
Send the SENS_ON command.
Servomotor Moves Instanta-
neously, then Stops
Servomotor or encoder wiring
incorrect.
−
Refer to chapter Chapter 3
and correct wiring.
Servomotor Speed Unstable Wiring connection to motor is
defective.
Check connection of power
lead (phases U, V, and W) and
encoder connectors.
Tighten any loose terminals or
connectors.
Servomotor Vibrates at Ap-
proximately 200 to 400 Hz.
Speed loop gain value is too
high.
− Reduce speed loop gain
(Pn100) preset value.
High Rotation Speed Over-
shoot on Starting and Stop-
ping.
Speed loop gain value is too
high.
− Reduce speed loop gain
(Pn100) preset value.
Increase integration time con-
stant (Pn101).
Speed loop gain is too low
compared to position loop
gain.
− Increase speed loop gain
(Pn100).
Reduce the integration time
constant (Pn101).

 Loading...
Loading...


