6.2 Settings According to Machine Characteristics
6-9
6
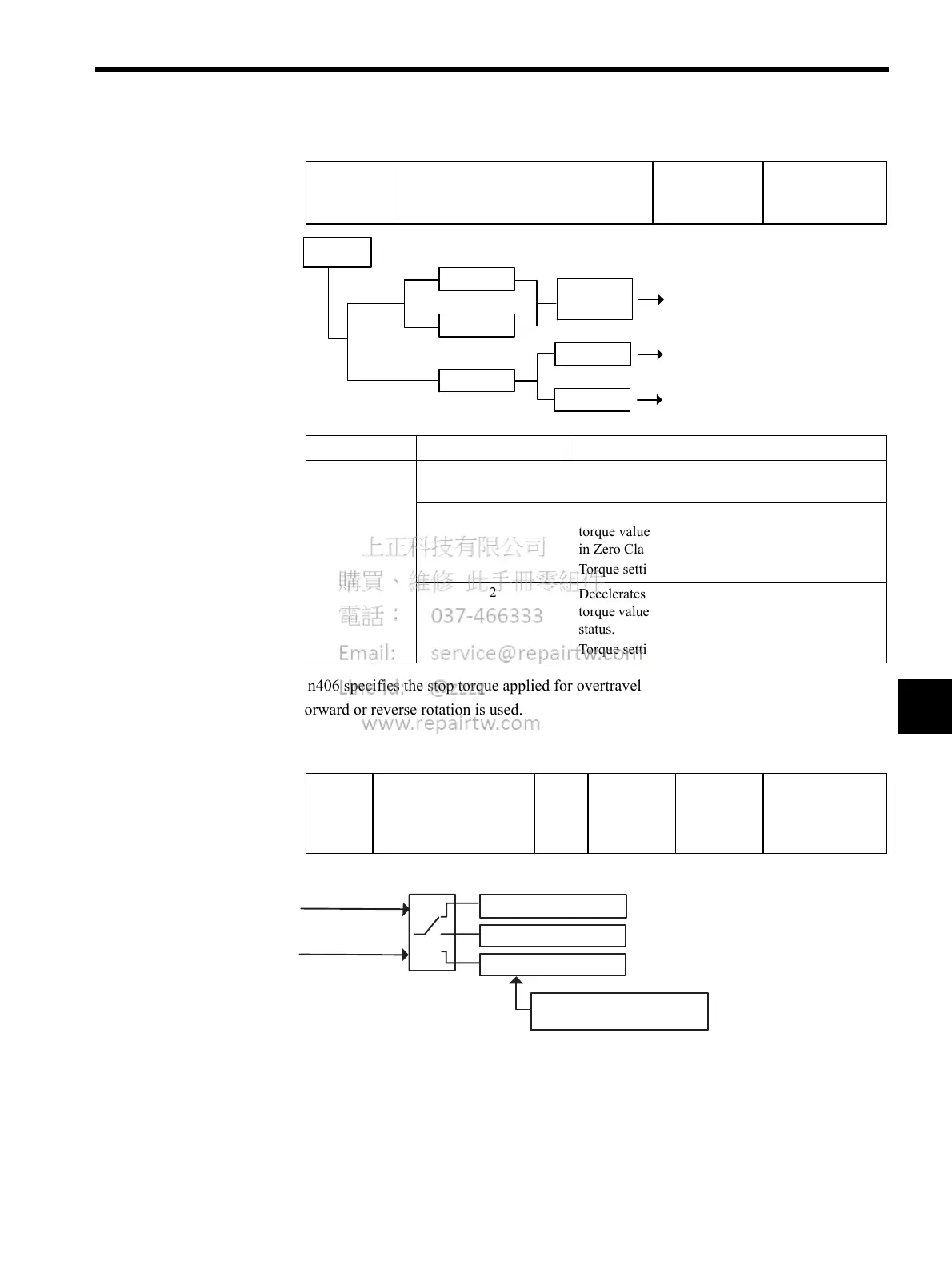
Pn406 specifies the stop torque applied for overtravel when the input signal for prohibiting
forward or reverse rotation is used.
The torque limit is specified as a percentage of rated torque.
Pn001.1 Overtravel Stop Mode Factory
Setting:
0
Position Control
Pn No. Setting Description
Pn001.1
0
Stops the servomotor the same way as changing to
Servo OFF (according to Pn001.0).
1
Decelerates the servomotor to a stop at the preset
torque value or less, and then locks the servomotor
in Zero Clamp Mode.
Torque setting: Pn406 emergency stop torque
2
Decelerates the servomotor to a stop at the preset
torque value or less, and puts the servomotor in coast
status.
Torque setting: Pn406 emergency stop torque
Pn406 Emergency Stop
Tor q ue
Unit:
%
Setting
Range:
0 to Max.
Tor que
Factory
Setting:
800
Valid when
Pn001.1 is 1 or 2
Stopby
dynamic
brake
Coast to a stop
Decelerate to a
stop
Zero clamp
Coast status
Coast
status
Pn001.1
setting
Stop Mode After stopping
Pn001.1 = 1 or 2
Pn001.0 = 0, 1
Pn001.1 = 0
0
1
2
2
Overtravel
Max. torque setting for an
emergency stop
Forward run
prohibited input
P-OT (CN1-42)
Reverse run
prohibited input
N-OT (CN1-43)
Stop Mode
Pn406
Stop by dynamic brake
Coast to a stop
Decelerate to a stop

 Loading...
Loading...


