6.3 Settings According to Host Controller
6-19
6
2. Check the number of encoder pulses for the SGMH servomotor.
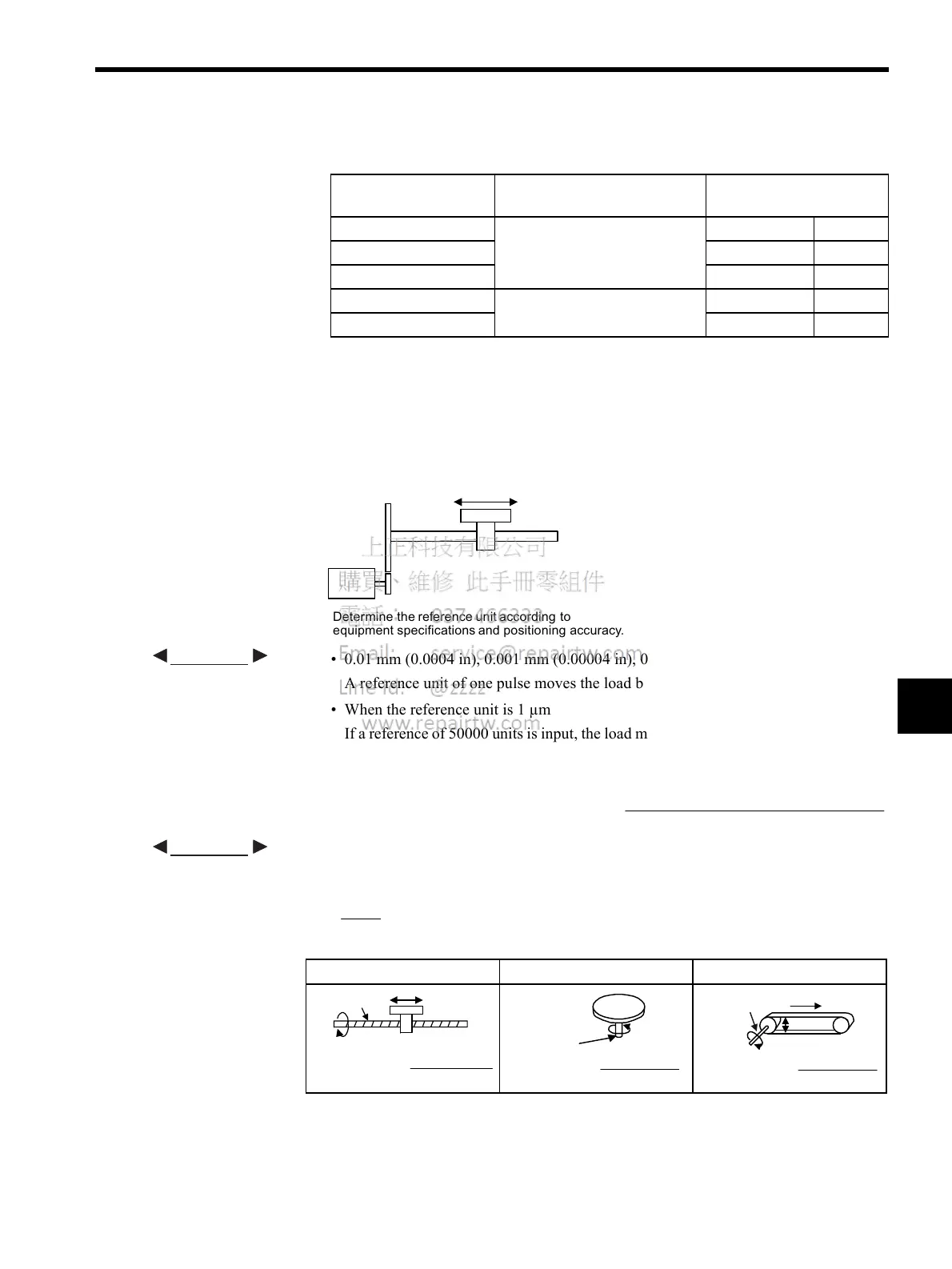
3. Determine the reference unit used.
A reference unit is the minimum position data unit used to move a load. (Minimum unit
of reference from the host controller.)
• 0.01 mm (0.0004 in), 0.001 mm (0.00004 in), 0.1°, 0.01 inch.
A reference unit of one pulse moves the load by one reference unit.
• When the reference unit is 1 µm
If a reference of 50000 units is input, the load moves 50 mm (1.97 in) (50000 x 1µm).
4. Determine the load travel distance per load shaft revolution in reference units.
• When the ball screw pitch is 5 mm (0.20 in) and the reference unit is 0.001 mm
(0.00004 in)
Servomotor Model and
Encoder Specifications
Encoder Type Number of Encoder Pulses
Per Revolution (P/R)
A
Incremental encoder
13 bits 2048
B 16 bits 16384
C 17 bits 32768
1
Absolute encoder
16 bits 16384
2 17 bits 32768
Reference unit: 0.001mm
Determine the reference unit according to
equipment specifications and positioning accuracy..
To move a table in 0.001mm units
EXAMPLE
Travel distance per load shaft revolution (reference unit) =
Travel distance per load shaft revolution
Reference unit
Ball Screw Circular Table Belt and Pulley
EXAMPLE
5
0.001
=5000(referenceunit)
Load shaft
P: Pitch
P
1revolution=
P
reference un it
Load shaft
1revolution=
360˚
reference unit
D: Pulley
D
π D
Load shaft
1revolution =
π D
reference unit

 Loading...
Loading...


