11 SVR Virtual Motion Module
11.2.2 Motion Parameter Settings
11-14
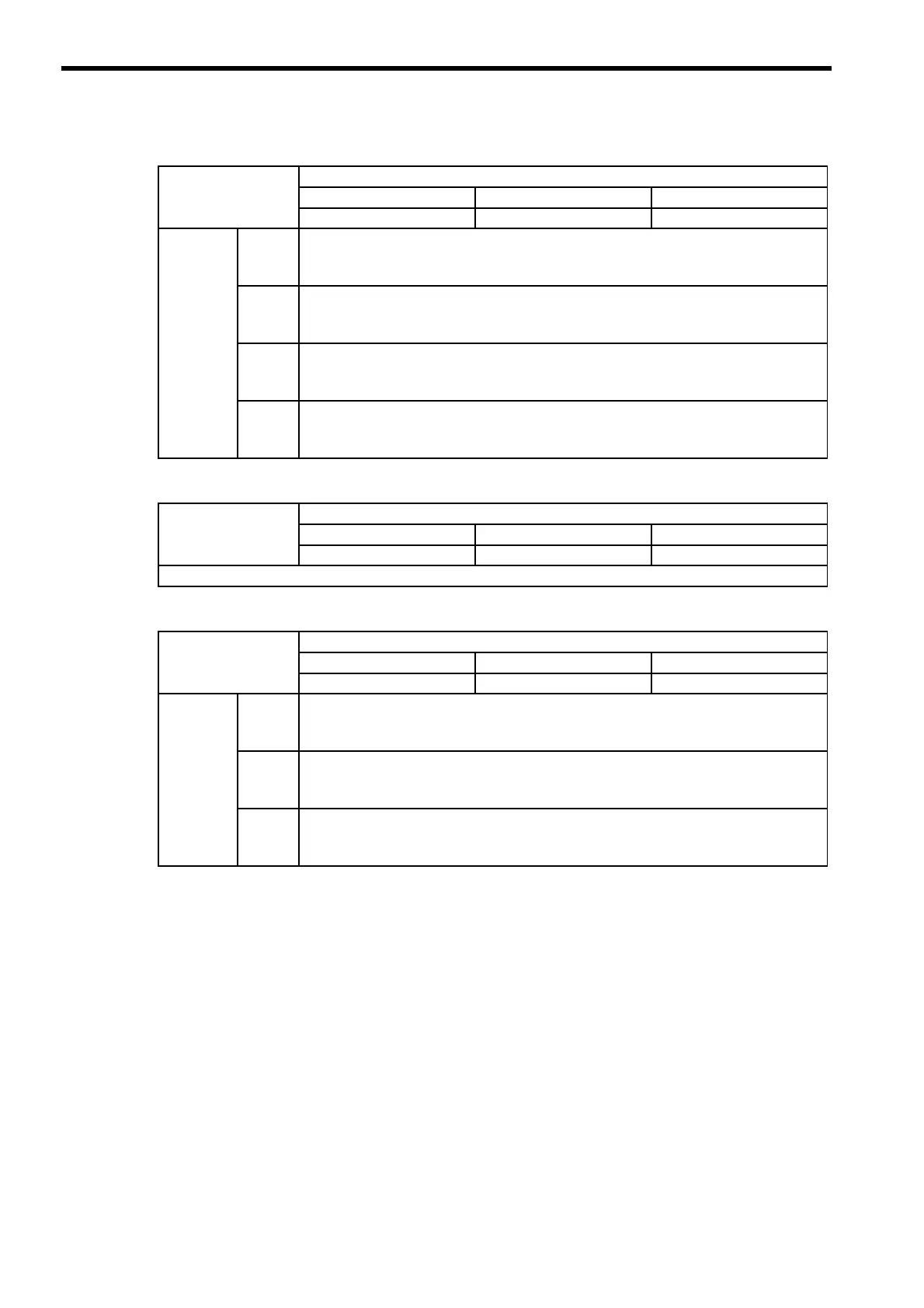
(f) Motion Command Status
(g) Motion Subcommand Response Code
(h) Motion Subcommand Status
IW
09
Servo Module Command Status
Range Unit
−−
IW
09
Bit 0
Command Executing (BUSY)
OFF: Ready (completed)
ON: Busy (processing)
Bit 1
Command Hold Completed (HOLDL)
OFF: Command hold processing not completed
ON: Command hold processing completed
Bit 3
Command Error Occurrence (FAIL)
OFF: Normal completion
ON: Abnormal completion
Bit 8
Command Execution Completed (COMPLETE)
OFF: Normal execution not completed
ON: Normal execution completed
IW
0A
Motion Subcommand Response Code
Range Unit
0 to 65535 −
Stores the motion subcommand code that is being executed.
IW
0B
Motion Subcommand Status
Range Unit
−−
IW
0B
Bit 0
Command Executing (BUSY)
OFF: Ready (completed)
ON: Busy (processing)
Bit 3
Command Error Occurrence (FAIL)
OFF: Normal completion
ON: Abnormal completion
Bit 8
Command Execution Completed (COMPLETE)
OFF: Normal execution not completed
ON: Normal execution completed
 Loading...
Loading...





