16.3 DeviceNet Attributes
16.3.7 Position Controller Object
16-13
23 Get/Set Direction BOOL Specifies the direction.
0: Reverse
1: Forward
24 Get/Set
Reference
Direction
BOOL
Specifies the forward direction when the
shaft is viewed from the back of the
motor.
0: CW is for-
ward.
1: CCW is for-
ward.
25 Get/Set Torque DINT
Specifies the Torque command for torque
control. Also, returns the monitor value of
the current torque.
0 to 800
26 Get/Set
Positive
Torque L imit
DINT
Specifies the forward torque limit.
Unit: 1%
0 to 800
27 Get/Set
Negative
Torque L imit
DINT
Specifies the reverse torque limit.
Unit: 1%
-800 to 0
30 Get/Set Kp UINT
Specifies the proportional gain for the
position loop.
Unit: 0.1/s
10 to 20,000
31 Get/Set Ki UINT
Specifies the integral time constant of the
position loop.
Unit: 0.1 ms
0 to 50,000
38 Get/Set
Position
Deadband
USINT
Specifies the positioning completed
width.
Unit: Reference units.
0 to 255
45 Get/Set
Max Dynamic
Following
Error
DINT
Specifies the maximum allowable follow-
ing deviation.
Unit: Reference units
1 to
1,073,741,823
48 Get
Actual Fol-
lowing Error
DINT
Gives the current position deviation.
Unit: Reference units
1 to
1,073,741,824
49 Get/Set
Hard Limit
Action
USINT Specifies the response to overtravel.
0: Servo OFF
1: Smooth stop
2: Hard stop
50 Get
CW
Hard Limit
BOOL
Gives the status of the CW overtravel sig-
nal.
0: Disabled
1: Enabled
51 Get
CCW
Hard Limit
BOOL
Gives the status of the CCW overtravel
signal.
0: Disabled
1: Enabled
52 Get/Set
Soft Limit
Enable
BOOL Enables the software limit.
0: Disabled
1: Enabled
53 Get/Set
So
ft Limit
Acti
on
USINT Specifies the response to a software limit.
1: Hard stop
2: Smooth stop
54 Get/Set
Positive Soft-
ware Limit
Position
DINT
Specifies the forward software limit posi-
tion.
Unit: Reference units
0x80000001 to
0x7FFFFFFF
55 Get/Set
Negative
Software
Limit Position
DINT
Specifies the reverse software limit posi-
tion.
Unit: Reference units
0x80000001 to
0x7FFFFFFF
56 Get
Positive Limit
State
BOOL
Gives the status of the forward software
limit.
0: Within limit
1: Outside limit
57 Get
Negative
Limit State
BOOL
Gives the status of the reverse software
limit.
0: Within limit
1: Outside limit
200 Get/Set
Approach
Velocity for
Positioning
DINT
Specifies the approach speed for posi-
tioning after switching to positioning.
Unit: Reference units/s
1 to
115,343,500
201 Get/Set End Position DINT
Specifies the end position after switching
to positioning.
Unit: Reference units
0 to
0x7FFFFFFF
231 Get/Set
Hard Limit
Enable
BOOL Specifies the overtravel settings.
0: Disabled
1: Enabled
Continued on next page.
Continued from previous page.
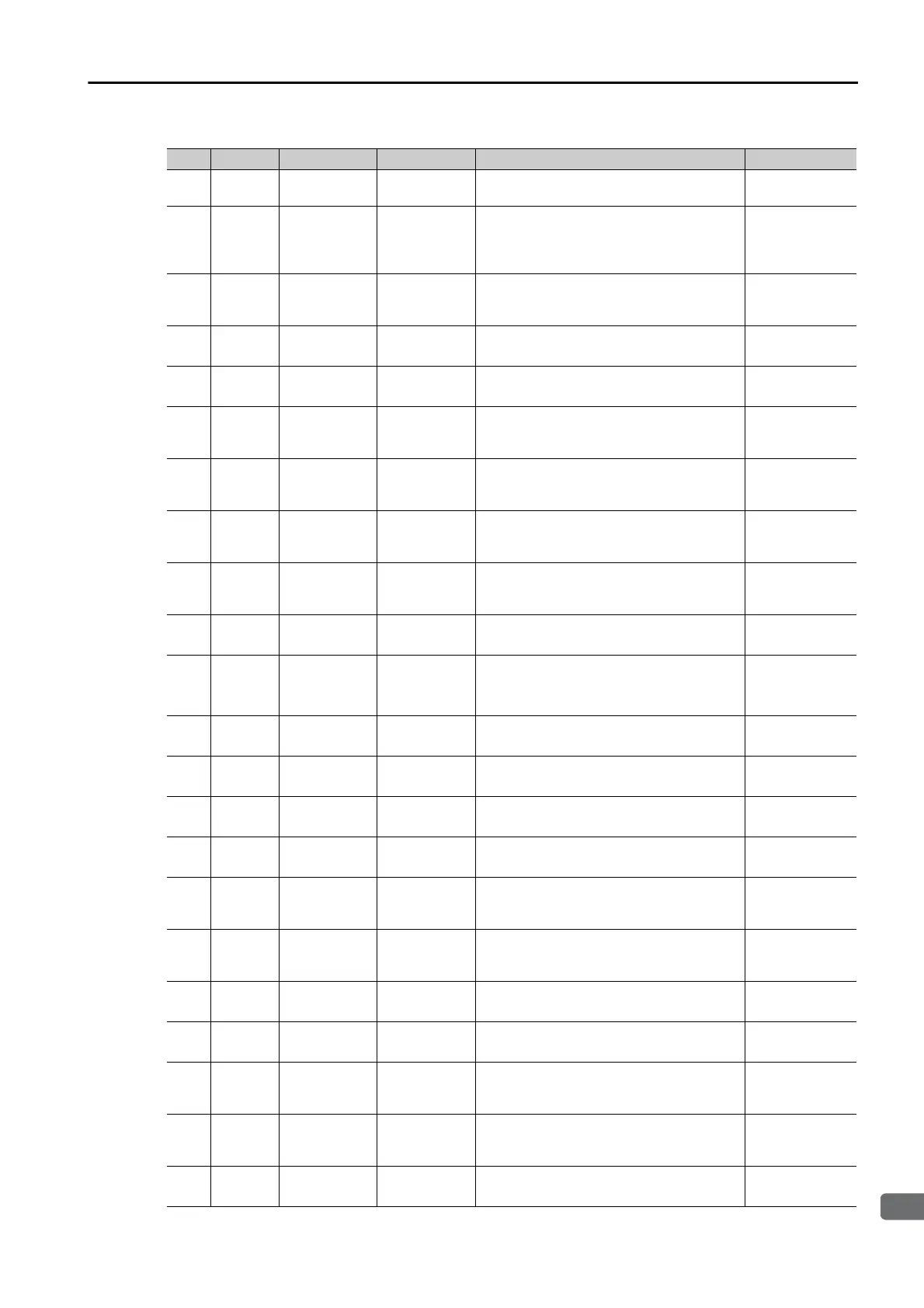
No. Access Name Data Type Description Value
 Loading...
Loading...




